A Swarm of Robots
Swarm behavior in artificial intelligence is explained as a group of robots working together as a team, much like a swarm of bees or ants. Swarm behavior occurs in nature and we try to mimic this behavior in robotic machines.
Robotic Vehicle Squads
Cooperating squads of robotic vehicles could be used for fighting forest fires, cleaning up oil spills, delivering and distributing supplies to remote field operations and conducting military missions.
Need
Using robotic vehicles in place of a human in potentially dangerous situations reduces the risk to human lives. Because a single operator can plan a set of tasks for a squad of robotic vehicles, the coordinated system can significantly increase the effectiveness of a single warfighter in the field.
Control and coordination of groups of robots has been reserved for science fiction, but High Consequence, Automation, & Robotics (HCAR) is working to develop these capabilities. In a Tactical Mobile Robotics (TMR) program for the Defense Advanced Research Projects Agency (DARPA), HCAR demonstrated the ability to remotely surround a facility with a squad of mobile robotic vehicles.
Mission
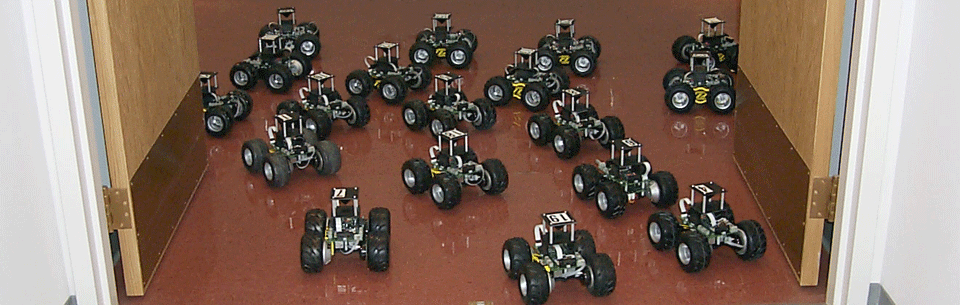
This proof-of-concept demonstration involved a squad of six RATLER™ mobile robotic vehicles. The RATLERs™ and their remote base-station began 200 meters away from the target facility. The vehicles had to autonomously navigate terrain typical of the desert southwest, including crossing a deep ravine, negotiating tumbleweeds and other thick brush, and following man-made tracks. Several of the vehicles then surrounded the perimeter near the rear exit of the facility while other vehicles entered the main entrance to create a diversion.
A single operator planned and executed the entire six-vehicle mission using the remote command station. The command station consists of an off-the-shelf laptop computer connected to a suite of radio transceivers. A custom PC-based application provides the interface. A command and control channel is used to download path and obstacle information to the vehicles, issue commands to the vehicles, and to relay status information about each vehicle to the laptop. Another radio link is connected to a Differential GPS (DGPS) transceiver. This sub-system transmits corrections to the GPS receivers on the vehicles so they can accurately determine their location. A separate radiofrequency is used to transmit a video signal from the vehicles. This allows the operator to see the camera view from any vehicle in real time.
First, the base-station’s location was determined by correlating the operator’s position to that on an aerial photograph or GIS map. The DGPS transceiver was then initialized. The operator used the interface to draw paths for the individual vehicles and to outline obstacles and goal perimeters. A simulation capability allowed the operator to preview the plan prior to execution. Then, the plan was downloaded to the vehicles and the mission began. Real-time updates and video allowed the operator to monitor the progress of each vehicle.
On the aerial photograph four different paths were selected for six vehicles to follow to the chosen facility. In addition, obstacles such as ditches were outlined with repulsive perimeters.
In the demonstration the vehicles were able to traverse the ravine by following their designated paths. Then, they autonomously navigated toward the goal perimeter while avoiding obstacles and spreading out. Once they reached the goal perimeter, one vehicle was given the task of entering the front gate. The successful completion of this proof-of-concept scenario revealed a unique capability of the RATLER™ squad.
Features
These carbon composite, electric, all-wheel drive vehicles are about the size of two bread boxes. In spite of their small size, the RATLERs™ have impressive off-road capability.
- A passive central pivot connecting the two halves provides a simple but effective suspension.
- Software on the vehicles accepts and processes path, obstacle, and goal perimeter information and executes the mission autonomously.
- By monitoring its own and the positions of the other vehicles, a vehicle is able to navigate to the goal while avoiding the pre-defined obstacles and other vehicles. An automated path-planning algorithm uses artificial force fields to repel the vehicle away from obstacles and other vehicles and attractive forces to direct the vehicle toward its goal.
- Tilt sensors provide a rudimentary obstacle recovery capability for unexpected obstacles.
Technology Transfer
As part of our program goals and objectives we are working closely with our industry partners to transfer this technology out of the laboratory and into a deployable system. Partnership opportunities exist for further technology and application development. For more information, please contact us.