3.4.4. Discrete system of equations
The full approximate pressure projection scheme for non-uniform density is now written as
(3.793)
(3.794)
(3.795)
The variable  is the residual that includes body source terms, pressure gradient, the non-symmetric part of the viscous stress term,
is the residual that includes body source terms, pressure gradient, the non-symmetric part of the viscous stress term,  , parts of the time term and the left-hand side set of operators acting on the
, parts of the time term and the left-hand side set of operators acting on the  state,
state,
(3.796)
The mass matrix,  , is defined by
, is defined by
(3.797)
The shape function above,  , is frequently evaluated at
, is frequently evaluated at  , the
coordinates of the vertex associated with the transport equation, i.e., the case where a lumped mass matrix is used.
, the
coordinates of the vertex associated with the transport equation, i.e., the case where a lumped mass matrix is used.
For simplicity, the central difference operator is provided in  as
as
(3.798)
In the preceding equation, the mass flow rate has been linearized within the iteration step and may or may not include the
explicit stabilization terms. Moreover, the shape function operator,  , may be evaluated at the edge
midpoints to retain the skew symmetric aspect of the operator
, may be evaluated at the edge
midpoints to retain the skew symmetric aspect of the operator  . By default, this term is evaluated at the subcontrol surface
integration points, which retains the CVFEM canonical 27-point stencil.
. By default, this term is evaluated at the subcontrol surface
integration points, which retains the CVFEM canonical 27-point stencil.
The symmetric part of the stress tensor is given by
(3.799)
while the non-symmetric stress tensor is given by
(3.800)
Note that the nodal pressure gradient at node  for control volume for direction
for control volume for direction  is defined by
(3.754). The operator,
is defined by
(3.754). The operator,  , contains the gravitational term as well as the
[potentially] subtracted out hydrostatic term,
, contains the gravitational term as well as the
[potentially] subtracted out hydrostatic term,
(3.801)
The old time term contribution,  , is defined by
, is defined by
(3.802)
Again,  is the set of all subcontrol volume integration points
for control volume , is the set of all subcontrol surface integration points for control
volume , and
is the set of all subcontrol volume integration points
for control volume , is the set of all subcontrol surface integration points for control
volume , and  is the set of all nodes within the element.
is the set of all nodes within the element.
3.4.4.1. Predictor
In general, there are a number of predictors that are supported. The easiest predictor is a simple predictor in which the old value is mapped into the current iterate. Predictors that incorporate old time derivatives include the forward Euler and Adams-Bashforth methods, e.g.,
(3.803)
(3.804)
(3.805)
3.4.4.1.1. Upwind Interpolation for Convection
We currently support several upwind interpolations for convection. The upwind methods are blended with a centered scheme that becomes dominant below a specified cell-Peclet number.
3.4.4.2. First Order Upwind
The first scheme is a simple first-order scheme that considers the two nodes adjacent to a control volume face and extrapolates from the node in the upwind direction.
(3.806)
The convention is that flow leaves the control volume to the left (L) and enters the control volume to the right (R). If the mass flow rate at the face is negative in value, then the node to the right will be selected.
3.4.4.3. Blending Function
The user specified upwind factor controls the blending between the pure upwind operator and a blended user-chosen upwind/central operator.
(3.807)
where  is the user specified first order upwind factor and
is the user specified first order upwind factor and
 represents the user specified upwind operator,
e.g., MUSCL, modified skew upwind, and even pure upwind.
represents the user specified upwind operator,
e.g., MUSCL, modified skew upwind, and even pure upwind.
The centered average of  is computed from the shape functions,
so it is based on all nodes in an element. The shape functions are
evaluated at the sub-face centroid.
The cell-Peclet number,
is computed from the shape functions,
so it is based on all nodes in an element. The shape functions are
evaluated at the sub-face centroid.
The cell-Peclet number,  , is used in the blending
function (see Figure 3.29)
, is used in the blending
function (see Figure 3.29)
(3.808)
The hybrid upwind factor,  , allows one to modify the functional
blending function; values of unity result in the normal blending function
response in Figure 3.29; values of zero yield
a pure central operator, i.e., blending function = 0.0; values
, allows one to modify the functional
blending function; values of unity result in the normal blending function
response in Figure 3.29; values of zero yield
a pure central operator, i.e., blending function = 0.0; values  1 result
in a blending function value of unity, i.e., pure upwind. The constant
1 result
in a blending function value of unity, i.e., pure upwind. The constant  is implemented as above with a value of 5. This value can not be changed
via the input file.
is implemented as above with a value of 5. This value can not be changed
via the input file.
The cell-Peclet number is computed for each sub-face in the element from the two adjacent left (L) and right (R) nodes.
(3.809)
A dot-product is implied by repeated indices.
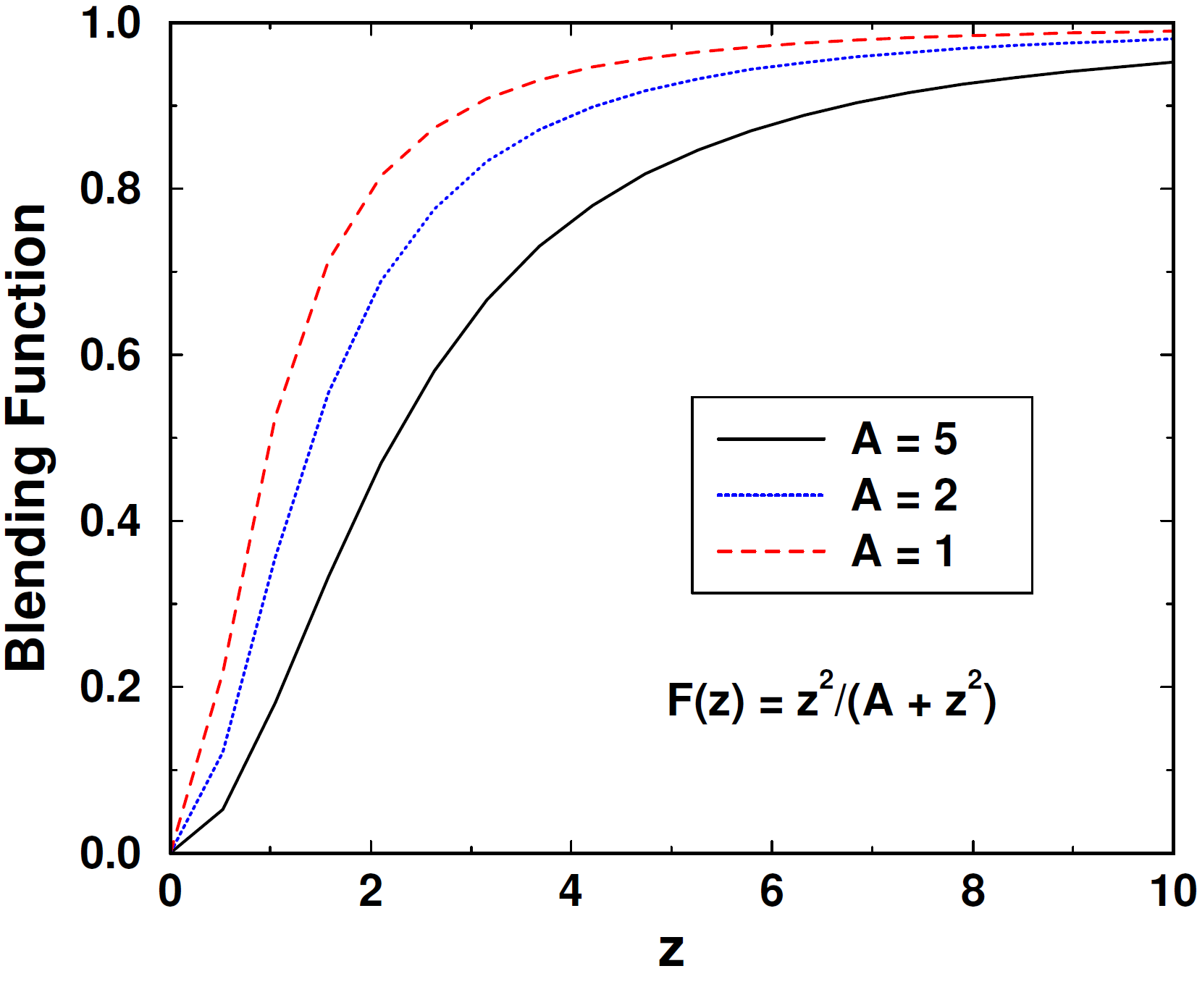
Fig. 3.29 Cell-Peclet number blending function.
3.4.4.4. Modified Linear Profile Skew Upwind
Modified linear profile skew upwinding is a simplification to the skew upwinding approach in the FIELDS scheme [150, 151]. We omit the physical advection correction terms. Integration point values at control volume subfaces are interpolated from upwind intersection points on the element face. In the original skew upwind scheme, the intersection point could either be interior subface or element faces. The interpolation coefficients were computed by inverting a matrix relation between integration point values and nodal values. The linear profile skew upwinding does not use interior subface intersections – only element face intersections. The modified scheme throws out nodes on an element face that are downwind of an interior subface as shown in Figure 3.30.
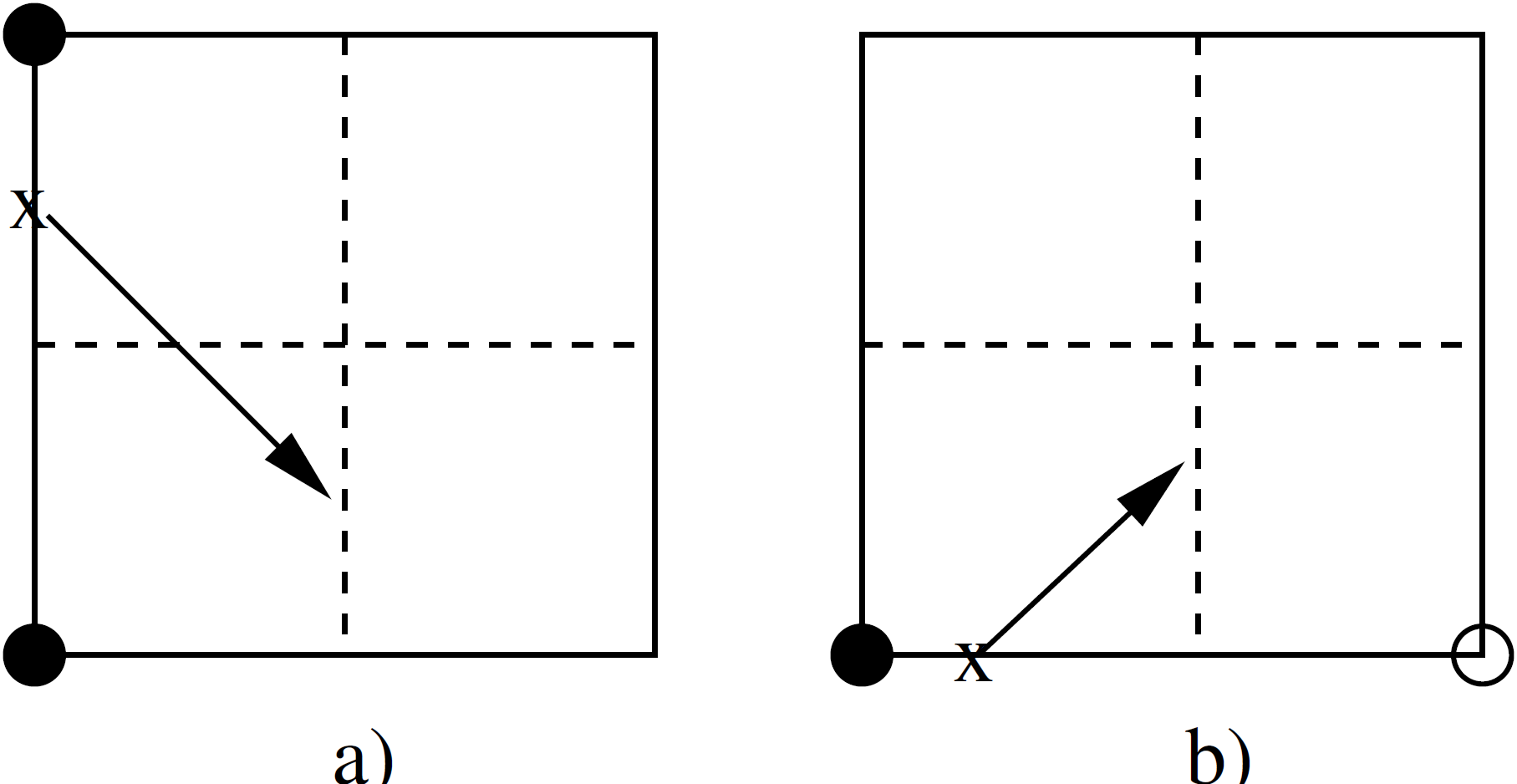
Fig. 3.30 Linear profile skew upwind scheme: a) all nodes on the intersected element face are upwind of the subface, b) omit nodes on intersected element face that are downwind of the subface.
3.4.4.5. MUSCL
The MUSCL approach (see Chap. 21 of Hirsch [230]) for higher order
upwinding is adapted to unstructured meshes. The upwind interpolation is
constructed along each edge of an element. The interpolation makes use of
the two end nodes of the edge and the centered gradient constructed at the two
end nodes. The MUSCL approach constructs an interpolation in one dimension
from four (or more) uniformly distributed nodal values. The two edge nodes are
 and
and  . The two other nodal values,
. The two other nodal values,  and
and
 , are interpolated from the unstructured mesh using the nodal
gradient information.
, are interpolated from the unstructured mesh using the nodal
gradient information.
The MUSCL scheme constructs left and right interpolants at the subface of the control volume. Without the limiter functions, the interpolation is
(3.810)![\phi_{i+1/2}^L = \phi_{i \phantom{+1}} + {1 \over 4} \left[
\left( 1 - \kappa \right) \left( \phi_{i} - \phi_{i-1} \right)
+ \left( 1 + \kappa \right) \left( \phi_{i+1} - \phi_{i} \right) \right] ,](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzM1My4wNzQ2NzhwdCcgaGVpZ2h0PScyNy45OTE2NTZwdCcgdmlld0JveD0nMTcuNzM0MTU2IC0yNy45OTE2NzEgMzUzLjA3NDY3OCAyNy45OTE2NTYnPgo8ZGVmcz4KPHVzZSBpZD0nZzEtMCcgeGxpbms6aHJlZj0nI2cwLTAnIHRyYW5zZm9ybT0nc2NhbGUoMS40Mjg1NzgpJy8+CjxwYXRoIGlkPSdnMi02MScgZD0nTTQuMjg2MTA4LTYuOTUxNTAxQzQuMzM0OTI1LTcuMDc4NDI1IDQuMzM0OTI1LTcuMTE3NDc4IDQuMzM0OTI1LTcuMTI3MjQyQzQuMzM0OTI1LTcuMjM0NjM4IDQuMjQ3MDU1LTcuMzIyNTA5IDQuMTM5NjU4LTcuMzIyNTA5QzQuMDcxMzE1LTcuMzIyNTA5IDQuMDAyOTcxLTcuMjkzMjE5IDMuOTczNjgxLTcuMjM0NjM4TC41ODU4MDEgMi4wNjk4MjlDLjUzNjk4NCAyLjE5Njc1MyAuNTM2OTg0IDIuMjM1ODA2IC41MzY5ODQgMi4yNDU1NjlDLjUzNjk4NCAyLjM1Mjk2NiAuNjI0ODU0IDIuNDQwODM2IC43MzIyNTEgMi40NDA4MzZDLjg1OTE3NCAyLjQ0MDgzNiAuODg4NDY0IDIuMzcyNDkzIC45NDcwNDQgMi4yMDY1MTZMNC4yODYxMDgtNi45NTE1MDFaJy8+CjxwYXRoIGlkPSdnMi03NicgZD0nTTMuNjUxNDkxLTUuOTA2ODI0QzMuNzM5MzYxLTYuMjU4MzA0IDMuNzY4NjUxLTYuMzY1NzAxIDQuNjg2NDA1LTYuMzY1NzAxQzQuOTc5MzA2LTYuMzY1NzAxIDUuMDU3NDEzLTYuMzY1NzAxIDUuMDU3NDEzLTYuNTUxMjA0QzUuMDU3NDEzLTYuNjY4MzY0IDQuOTUwMDE2LTYuNjY4MzY0IDQuOTAxMTk5LTYuNjY4MzY0QzQuNTc5MDA5LTYuNjY4MzY0IDMuNzc4NDE0LTYuNjM5MDc0IDMuNDU2MjI0LTYuNjM5MDc0QzMuMTYzMzI0LTYuNjM5MDc0IDIuNDUwNi02LjY2ODM2NCAyLjE1NzY5OS02LjY2ODM2NEMyLjA4OTM1Ni02LjY2ODM2NCAxLjk3MjE5Ni02LjY2ODM2NCAxLjk3MjE5Ni02LjQ3MzA5OEMxLjk3MjE5Ni02LjM2NTcwMSAyLjA2MDA2Ni02LjM2NTcwMSAyLjI0NTU2OS02LjM2NTcwMUMyLjI2NTA5Ni02LjM2NTcwMSAyLjQ1MDYtNi4zNjU3MDEgMi42MTY1NzYtNi4zNDYxNzRDMi43OTIzMTctNi4zMjY2NDcgMi44ODAxODctNi4zMTY4ODQgMi44ODAxODctNi4xODk5NjFDMi44ODAxODctNi4xNTA5MDcgMi44NzA0MjMtNi4xMjE2MTcgMi44NDExMzMtNi4wMDQ0NTdMMS41MzI4NDUtLjc2MTU0MUMxLjQzNTIxMi0uMzgwNzcgMS40MTU2ODUtLjMwMjY2NCAuNjQ0MzgxLS4zMDI2NjRDLjQ3ODQwNC0uMzAyNjY0IC4zODA3Ny0uMzAyNjY0IC4zODA3Ny0uMTA3Mzk3Qy4zODA3NyAwIC40Njg2NDEgMCAuNjQ0MzgxIDBINS4xNjQ4MDlDNS4zOTkxMyAwIDUuNDA4ODkzIDAgNS40Njc0NzMtLjE2NTk3N0w2LjIzODc3Ny0yLjI3NDg1OUM2LjI3NzgzMS0yLjM4MjI1NiA2LjI3NzgzMS0yLjQwMTc4MyA2LjI3NzgzMS0yLjQxMTU0NkM2LjI3NzgzMS0yLjQ1MDYgNi4yNDg1NDEtMi41MTg5NDMgNi4xNjA2NzEtMi41MTg5NDNTNi4wNjMwMzctMi40NzAxMjYgNS45OTQ2OTQtMi4zMTM5MTNDNS42NjI3NC0xLjQxNTY4NSA1LjIzMzE1My0uMzAyNjY0IDMuNTQ0MDk0LS4zMDI2NjRIMi42MjYzNEMyLjQ4OTY1My0uMzAyNjY0IDIuNDcwMTI2LS4zMDI2NjQgMi40MTE1NDYtLjMxMjQyN0MyLjMxMzkxMy0uMzIyMTkgMi4yODQ2MjMtLjMzMTk1NCAyLjI4NDYyMy0uNDEwMDZDMi4yODQ2MjMtLjQzOTM1MSAyLjI4NDYyMy0uNDU4ODc3IDIuMzMzNDM5LS42MzQ2MTdMMy42NTE0OTEtNS45MDY4MjRaJy8+CjxwYXRoIGlkPSdnMi0xMDUnIGQ9J00yLjc3Mjc5LTYuMTAyMDlDMi43NzI3OS02LjI5NzM1NyAyLjYzNjEwMy02LjQ1MzU3MSAyLjQxMTU0Ni02LjQ1MzU3MUMyLjE0NzkzNi02LjQ1MzU3MSAxLjg4NDMyNi02LjE5OTcyNCAxLjg4NDMyNi01LjkzNjExNEMxLjg4NDMyNi01Ljc1MDYxIDIuMDIxMDEyLTUuNTg0NjMzIDIuMjU1MzMzLTUuNTg0NjMzQzIuNDc5ODktNS41ODQ2MzMgMi43NzI3OS01LjgwOTE5IDIuNzcyNzktNi4xMDIwOVpNMi4wMzA3NzYtMi40MzEwNzNDMi4xNDc5MzYtMi43MTQyMSAyLjE0NzkzNi0yLjczMzczNyAyLjI0NTU2OS0yLjk5NzM0N0MyLjMyMzY3Ni0zLjE5MjYxNCAyLjM3MjQ5My0zLjMyOTMwMSAyLjM3MjQ5My0zLjUxNDgwNEMyLjM3MjQ5My0zLjk1NDE1NSAyLjA2MDA2Ni00LjMxNTM5OCAxLjU3MTg5OS00LjMxNTM5OEMuNjU0MTQ0LTQuMzE1Mzk4IC4yODMxMzctMi44OTk3MTMgLjI4MzEzNy0yLjgxMTg0M0MuMjgzMTM3LTIuNzE0MjEgLjM4MDc3LTIuNzE0MjEgLjQwMDI5Ny0yLjcxNDIxQy40OTc5MzEtMi43MTQyMSAuNTA3Njk0LTIuNzMzNzM3IC41NTY1MTEtMi44ODk5NUMuODIwMTIxLTMuODA3NzA0IDEuMjEwNjU1LTQuMTAwNjA1IDEuNTQyNjA4LTQuMTAwNjA1QzEuNjIwNzE1LTQuMTAwNjA1IDEuNzg2NjkyLTQuMTAwNjA1IDEuNzg2NjkyLTMuNzg4MTc4QzEuNzg2NjkyLTMuNTgzMTQ4IDEuNzE4MzQ5LTMuMzc4MTE3IDEuNjc5Mjk1LTMuMjgwNDg0QzEuNjAxMTg5LTMuMDI2NjM3IDEuMTYxODM4LTEuODk0MDg5IDEuMDA1NjI1LTEuNDc0MjY1Qy45MDc5OTEtMS4yMjA0MTggLjc4MTA2OC0uODk4MjI4IC43ODEwNjgtLjY5MzE5N0MuNzgxMDY4LS4yMzQzMiAxLjExMzAyMSAuMTA3Mzk3IDEuNTgxNjYyIC4xMDczOTdDMi40OTk0MTYgLjEwNzM5NyAyLjg2MDY2LTEuMzA4Mjg4IDIuODYwNjYtMS4zOTYxNThDMi44NjA2Ni0xLjQ5Mzc5MiAyLjc3Mjc5LTEuNDkzNzkyIDIuNzQzNS0xLjQ5Mzc5MkMyLjY0NTg2Ni0xLjQ5Mzc5MiAyLjY0NTg2Ni0xLjQ2NDUwMiAyLjU5NzA1LTEuMzE4MDUyQzIuNDIxMzA5LS43MDI5NjEgMi4wOTkxMTktLjEwNzM5NyAxLjYwMTE4OS0uMTA3Mzk3QzEuNDM1MjEyLS4xMDczOTcgMS4zNjY4NjgtLjIwNTAzIDEuMzY2ODY4LS40Mjk1ODdDMS4zNjY4NjgtLjY3MzY3MSAxLjQyNTQ0OC0uODEwMzU4IDEuNjUwMDA1LTEuNDA1OTIyTDIuMDMwNzc2LTIuNDMxMDczWicvPgo8cGF0aCBpZD0nZzMtMjAnIGQ9J00yLjk3MDg1OS0zLjQ4NjkyNEMzLjQzMTEzMy0zLjczNzk4MyAzLjk0NzE5OC00LjE3MDM2MSA0LjI5NTg5LTQuNDYzMjYzQzUuMTMyNzUyLTUuMTg4NTQzIDUuNDM5NjAxLTUuNDExNzA2IDUuOTY5NjE0LTUuNjIwOTIyQzUuOTEzODIzLTUuNTM3MjM1IDUuODk5ODc1LTUuNDI1NjU0IDUuODk5ODc1LTUuMzI4MDJDNS44OTk4NzUtNC45NTE0MzIgNi4yMjA2NzItNC44ODE2OTQgNi4zNjAxNDktNC44ODE2OTRDNi44MDY0NzYtNC44ODE2OTQgNy4wNTc1MzQtNS4zMDAxMjUgNy4wNTc1MzQtNS41NjUxMzFDNy4wNTc1MzQtNS42NDg4MTcgNy4wMjk2MzktNi4wMTE0NTcgNi41NDE0NjktNi4wMTE0NTdDNS43MDQ2MDgtNi4wMTE0NTcgNC44ODE2OTQtNS4zMDAxMjUgNC4yNjc5OTUtNC43ODQwNkMzLjQ1OTAyOS00LjA3MjcyNyAzLjA1NDU0NS0zLjc2NTg3OCAyLjQ4MjY5LTMuNTg0NTU4TDMuMDEyNzAyLTUuODAyMjQyQzMuMDEyNzAyLTYuMDI1NDA1IDIuODMxMzgyLTYuMTUwOTM0IDIuNjUwMDYyLTYuMTUwOTM0QzIuNTI0NTMzLTYuMTUwOTM0IDIuMjE3Njg0LTYuMTA5MDkxIDIuMTA2MTAyLTUuNjYyNzY1TC44MDg5NjYtLjQ4ODE2OUMuNzY3MTIzLS4zMjA3OTcgLjc2NzEyMy0uMjkyOTAyIC43NjcxMjMtLjIwOTIxNUMuNzY3MTIzLS4wMTM5NDggLjkyMDU0OCAuMTM5NDc3IDEuMTI5NzYzIC4xMzk0NzdDMS41NDgxOTQgLjEzOTQ3NyAxLjYzMTg4LS4yMjMxNjMgMS43MDE2MTktLjUxNjA2NUMxLjc4NTMwNS0uODA4OTY2IDIuMzU3MTYxLTMuMTM4MjMyIDIuMzg1MDU2LTMuMjIxOTE4QzQuMTU2NDEzLTMuMTM4MjMyIDQuNzU2MTY0LTIuNjkxOTA1IDQuNzU2MTY0LTIuMDA4NDY4QzQuNzU2MTY0LTEuOTEwODM0IDQuNzU2MTY0LTEuODY4OTkxIDQuNzE0MzIxLTEuNzE1NTY3QzQuNjU4NTMxLTEuNDUwNTYgNC42NTg1MzEtMS4yOTcxMzYgNC42NTg1MzEtMS4yMTM0NUM0LjY1ODUzMS0uMzc2NTg4IDUuMjAyNDkxIC4xMzk0NzcgNS44ODU5MjggLjEzOTQ3N0M2LjQ1Nzc4MyAuMTM5NDc3IDYuNzc4NTgtLjI2NTAwNiA2Ljk4Nzc5Ni0uNjI3NjQ2QzcuMjgwNjk3LTEuMTcxNjA2IDcuNDYyMDE3LTEuOTM4NzMgNy40NjIwMTctMS45OTQ1MjFDNy40NjIwMTctMi4wNjQyNTkgNy40MDYyMjctMi4xMjAwNSA3LjMyMjU0LTIuMTIwMDVDNy4xOTcwMTEtMi4xMjAwNSA3LjE4MzA2NC0yLjA2NDI1OSA3LjEyNzI3My0xLjg0MTA5NkM2Ljk0NTk1My0xLjE3MTYwNiA2LjYzOTEwMy0uMTM5NDc3IDUuOTI3NzcxLS4xMzk0NzdDNS42MjA5MjItLjEzOTQ3NyA1LjQ2NzQ5Ny0uMzIwNzk3IDUuNDY3NDk3LS44MDg5NjZDNS40Njc0OTctMS4wNzM5NzMgNS41MjMyODgtMS4zODA4MjIgNS41NzkwNzgtMS41OTAwMzdDNS42MDY5NzQtMS43Mjk1MTQgNS42NDg4MTctMS44OTY4ODcgNS42NDg4MTctMi4wNTAzMTFDNS42NDg4MTctMy4zMTk1NTIgMy44OTE0MDctMy40NDUwODEgMi45NzA4NTktMy40ODY5MjRaJy8+CjxwYXRoIGlkPSdnMy0zMCcgZD0nTTUuOTk3NTA5LTkuNTU0MTcyQzUuOTk3NTA5LTkuNjc5NzAxIDUuODk5ODc1LTkuNjc5NzAxIDUuODU4MDMyLTkuNjc5NzAxQzUuNzMyNTAzLTkuNjc5NzAxIDUuNzE4NTU1LTkuNjUxODA2IDUuNjYyNzY1LTkuNDE0Njk1TDQuOTA5NTg5LTYuNDE1OTRDNC44Njc3NDYtNi4yMzQ2MiA0Ljg1Mzc5OC02LjIyMDY3MiA0LjgzOTg1MS02LjIwNjcyNUM0LjgyNTkwMy02LjE3ODgyOSA0LjcyODI2OS02LjE2NDg4MiA0LjcwMDM3NC02LjE2NDg4MkMyLjQxMjk1MS01Ljk2OTYxNCAuNjU1NTQyLTQuMDg2Njc1IC42NTU1NDItMi4zNDMyMTNDLjY1NTU0Mi0uODM2ODYyIDEuODEzMiAuMDgzNjg2IDMuMjYzNzYxIC4xNjczNzJDMy4xNTIxNzkgLjU5OTc1MSAzLjA1NDU0NSAxLjA0NjA3NyAyLjk0Mjk2NCAxLjQ3ODQ1NkMyLjc0NzY5NiAyLjIxNzY4NCAyLjYzNjExNSAyLjY3Nzk1OCAyLjYzNjExNSAyLjczMzc0OEMyLjYzNjExNSAyLjc2MTY0NCAyLjYzNjExNSAyLjg0NTMzIDIuNzc1NTkyIDIuODQ1MzNDMi44MTc0MzUgMi44NDUzMyAyLjg3MzIyNSAyLjg0NTMzIDIuOTAxMTIxIDIuNzg5NTM5QzIuOTI5MDE2IDIuNzYxNjQ0IDMuMDEyNzAyIDIuNDI2ODk5IDMuMDY4NDkzIDIuMjQ1NTc5TDMuNTg0NTU4IC4xNjczNzJDNS45Njk2MTQgLjA0MTg0MyA3Ljc4MjgxNC0xLjkxMDgzNCA3Ljc4MjgxNC0zLjY2ODI0NEM3Ljc4MjgxNC01LjA3Njk2MSA2LjcyMjc5LTYuMDgxMTk2IDUuMTc0NTk1LTYuMTc4ODI5TDUuOTk3NTA5LTkuNTU0MTcyWk01LjA5MDkwOS01Ljg5OTg3NUM2LjAxMTQ1Ny01Ljg0NDA4NSA2LjkzMjAwNS01LjMyODAyIDYuOTMyMDA1LTMuOTYxMTQ2QzYuOTMyMDA1LTIuMzg1MDU2IDUuODMwMTM3LS4yOTI5MDIgMy42NTQyOTYtLjEyNTUyOUw1LjA5MDkwOS01Ljg5OTg3NVpNMy4zMzM0OTktLjExMTU4MkMyLjY1MDA2Mi0uMTUzNDI1IDEuNTA2MzUxLS41MTYwNjUgMS41MDYzNTEtMi4wNTAzMTFDMS41MDYzNTEtMy44MDc3MjEgMi43NzU1OTItNS43NjAzOTkgNC43ODQwNi01Ljg4NTkyOEwzLjMzMzQ5OS0uMTExNTgyWicvPgo8cGF0aCBpZD0nZzMtNTknIGQ9J00yLjcxOTgwMSAuMDU1NzkxQzIuNzE5ODAxLS43NTMxNzYgMi40NTQ3OTUtMS4zNTI5MjcgMS44ODI5MzktMS4zNTI5MjdDMS40MzY2MTMtMS4zNTI5MjcgMS4yMTM0NS0uOTkwMjg2IDEuMjEzNDUtLjY4MzQzN1MxLjQyMjY2NSAwIDEuODk2ODg3IDBDMi4wNzgyMDcgMCAyLjIzMTYzMS0uMDU1NzkxIDIuMzU3MTYxLS4xODEzMkMyLjM4NTA1Ni0uMjA5MjE1IDIuMzk5MDA0LS4yMDkyMTUgMi40MTI5NTEtLjIwOTIxNUMyLjQ0MDg0Ny0uMjA5MjE1IDIuNDQwODQ3LS4wMTM5NDggMi40NDA4NDcgLjA1NTc5MUMyLjQ0MDg0NyAuNTE2MDY1IDIuMzU3MTYxIDEuNDIyNjY1IDEuNTQ4MTk0IDIuMzI5MjY1QzEuMzk0NzcgMi40OTY2MzggMS4zOTQ3NyAyLjUyNDUzMyAxLjM5NDc3IDIuNTUyNDI4QzEuMzk0NzcgMi42MjIxNjcgMS40NjQ1MDggMi42OTE5MDUgMS41MzQyNDcgMi42OTE5MDVDMS42NDU4MjggMi42OTE5MDUgMi43MTk4MDEgMS42NTk3NzYgMi43MTk4MDEgLjA1NTc5MVonLz4KPHBhdGggaWQ9J2c0LTQzJyBkPSdNMy45OTMyMDgtMi4yNDU1NjlINi43MTcxODFDNi44NTM4NjgtMi4yNDU1NjkgNy4wMzkzNzItMi4yNDU1NjkgNy4wMzkzNzItMi40NDA4MzZTNi44NTM4NjgtMi42MzYxMDMgNi43MTcxODEtMi42MzYxMDNIMy45OTMyMDhWLTUuMzY5ODRDMy45OTMyMDgtNS41MDY1MjYgMy45OTMyMDgtNS42OTIwMyAzLjc5Nzk0MS01LjY5MjAzUzMuNjAyNjc0LTUuNTA2NTI2IDMuNjAyNjc0LTUuMzY5ODRWLTIuNjM2MTAzSC44Njg5MzhDLjczMjI1MS0yLjYzNjEwMyAuNTQ2NzQ3LTIuNjM2MTAzIC41NDY3NDctMi40NDA4MzZTLjczMjI1MS0yLjI0NTU2OSAuODY4OTM4LTIuMjQ1NTY5SDMuNjAyNjc0Vi40ODgxNjdDMy42MDI2NzQgLjYyNDg1NCAzLjYwMjY3NCAuODEwMzU4IDMuNzk3OTQxIC44MTAzNThTMy45OTMyMDggLjYyNDg1NCAzLjk5MzIwOCAuNDg4MTY3Vi0yLjI0NTU2OVonLz4KPHBhdGggaWQ9J2c0LTQ5JyBkPSdNMi44NzA0MjMtNi4yNDg1NDFDMi44NzA0MjMtNi40ODI4NjEgMi44NzA0MjMtNi41MDIzODggMi42NDU4NjYtNi41MDIzODhDMi4wNDA1MzktNS44Nzc1MzQgMS4xODEzNjUtNS44Nzc1MzQgLjg2ODkzOC01Ljg3NzUzNFYtNS41NzQ4N0MxLjA2NDIwNS01LjU3NDg3IDEuNjQwMjQyLTUuNTc0ODcgMi4xNDc5MzYtNS44Mjg3MTdWLS43NzEzMDRDMi4xNDc5MzYtLjQxOTgyNCAyLjExODY0Ni0uMzAyNjY0IDEuMjM5OTQ1LS4zMDI2NjRILjkyNzUxOFYwQzEuMjY5MjM1LS4wMjkyOSAyLjExODY0Ni0uMDI5MjkgMi41MDkxOC0uMDI5MjlTMy43NDkxMjQtLjAyOTI5IDQuMDkwODQxIDBWLS4zMDI2NjRIMy43Nzg0MTRDMi44OTk3MTMtLjMwMjY2NCAyLjg3MDQyMy0uNDEwMDYgMi44NzA0MjMtLjc3MTMwNFYtNi4yNDg1NDFaJy8+CjxwYXRoIGlkPSdnNC01MCcgZD0nTTEuMjM5OTQ1LS43NTE3NzhMMi4yNzQ4NTktMS43NTc0MDJDMy43OTc5NDEtMy4xMDQ3NDQgNC4zODM3NDItMy42MzE5NjQgNC4zODM3NDItNC42MDgyOTlDNC4zODM3NDItNS43MjEzMiAzLjUwNTA0MS02LjUwMjM4OCAyLjMxMzkxMy02LjUwMjM4OEMxLjIxMDY1NS02LjUwMjM4OCAuNDg4MTY3LTUuNjA0MTYgLjQ4ODE2Ny00LjczNTIyMkMuNDg4MTY3LTQuMTg4NDc1IC45NzYzMzQtNC4xODg0NzUgMS4wMDU2MjUtNC4xODg0NzVDMS4xNzE2MDEtNC4xODg0NzUgMS41MTMzMTgtNC4zMDU2MzUgMS41MTMzMTgtNC43MDU5MzJDMS41MTMzMTgtNC45NTk3NzkgMS4zMzc1NzgtNS4yMTM2MjYgLjk5NTg2MS01LjIxMzYyNkMuOTE3NzU0LTUuMjEzNjI2IC44OTgyMjgtNS4yMTM2MjYgLjg2ODkzOC01LjIwMzg2M0MxLjA5MzQ5NS01LjgzODQ4IDEuNjIwNzE1LTYuMTk5NzI0IDIuMTg2OTg5LTYuMTk5NzI0QzMuMDc1NDU0LTYuMTk5NzI0IDMuNDk1Mjc3LTUuNDA4ODkzIDMuNDk1Mjc3LTQuNjA4Mjk5QzMuNDk1Mjc3LTMuODI3MjMxIDMuMDA3MTEtMy4wNTU5MjcgMi40NzAxMjYtMi40NTA2TC41OTU1NjQtLjM2MTI0NEMuNDg4MTY3LS4yNTM4NDcgLjQ4ODE2Ny0uMjM0MzIgLjQ4ODE2NyAwSDQuMTEwMzY4TDQuMzgzNzQyLTEuNjk4ODIySDQuMTM5NjU4QzQuMDkwODQxLTEuNDA1OTIyIDQuMDIyNDk4LS45NzYzMzQgMy45MjQ4NjUtLjgyOTg4NEMzLjg1NjUyMS0uNzUxNzc4IDMuMjEyMTQtLjc1MTc3OCAyLjk5NzM0Ny0uNzUxNzc4SDEuMjM5OTQ1WicvPgo8cGF0aCBpZD0nZzAtMCcgZD0nTTYuNDM0MDQ0LTIuMjQ1NTY5QzYuNjAwMDIxLTIuMjQ1NTY5IDYuNzc1NzYxLTIuMjQ1NTY5IDYuNzc1NzYxLTIuNDQwODM2UzYuNjAwMDIxLTIuNjM2MTAzIDYuNDM0MDQ0LTIuNjM2MTAzSDEuMTUyMDc1Qy45ODYwOTgtMi42MzYxMDMgLjgxMDM1OC0yLjYzNjEwMyAuODEwMzU4LTIuNDQwODM2Uy45ODYwOTgtMi4yNDU1NjkgMS4xNTIwNzUtMi4yNDU1NjlINi40MzQwNDRaJy8+CjxwYXRoIGlkPSdnNS00MCcgZD0nTTQuNTMzMDAxIDMuMzg5MjlDNC41MzMwMDEgMy4zNDc0NDcgNC41MzMwMDEgMy4zMTk1NTIgNC4yOTU4OSAzLjA4MjQ0MUMyLjkwMTEyMSAxLjY3MzcyNCAyLjEyMDA1LS42Mjc2NDYgMi4xMjAwNS0zLjQ3Mjk3NkMyLjEyMDA1LTYuMTc4ODI5IDIuNzc1NTkyLTguNTA4MDk1IDQuMzkzNTI0LTEwLjE1MzkyM0M0LjUzMzAwMS0xMC4yNzk0NTIgNC41MzMwMDEtMTAuMzA3MzQ3IDQuNTMzMDAxLTEwLjM0OTE5MUM0LjUzMzAwMS0xMC40MzI4NzcgNC40NjMyNjMtMTAuNDYwNzcyIDQuNDA3NDcyLTEwLjQ2MDc3MkM0LjIyNjE1Mi0xMC40NjA3NzIgMy4wODI0NDEtOS40NTY1MzggMi4zOTkwMDQtOC4wODk2NjRDMS42ODc2NzEtNi42ODA5NDYgMS4zNjY4NzQtNS4xODg1NDMgMS4zNjY4NzQtMy40NzI5NzZDMS4zNjY4NzQtMi4yMzE2MzEgMS41NjIxNDItLjU3MTg1NiAyLjI4NzQyMiAuOTIwNTQ4QzMuMTEwMzM2IDIuNTk0MjcxIDQuMjU0MDQ3IDMuNTAwODcyIDQuNDA3NDcyIDMuNTAwODcyQzQuNDYzMjYzIDMuNTAwODcyIDQuNTMzMDAxIDMuNDcyOTc2IDQuNTMzMDAxIDMuMzg5MjlaJy8+CjxwYXRoIGlkPSdnNS00MScgZD0nTTMuOTMzMjUtMy40NzI5NzZDMy45MzMyNS00LjUzMzAwMSAzLjc5Mzc3My02LjI2MjUxNiAzLjAxMjcwMi03Ljg4MDQ0OEMyLjE4OTc4OC05LjU1NDE3MiAxLjA0NjA3Ny0xMC40NjA3NzIgLjg5MjY1My0xMC40NjA3NzJDLjgzNjg2Mi0xMC40NjA3NzIgLjc2NzEyMy0xMC40MzI4NzcgLjc2NzEyMy0xMC4zNDkxOTFDLjc2NzEyMy0xMC4zMDczNDcgLjc2NzEyMy0xMC4yNzk0NTIgMS4wMDQyMzQtMTAuMDQyMzQxQzIuMzk5MDA0LTguNjMzNjI0IDMuMTgwMDc1LTYuMzMyMjU0IDMuMTgwMDc1LTMuNDg2OTI0QzMuMTgwMDc1LS43ODEwNzEgMi41MjQ1MzMgMS41NDgxOTQgLjkwNjYgMy4xOTQwMjJDLjc2NzEyMyAzLjMxOTU1MiAuNzY3MTIzIDMuMzQ3NDQ3IC43NjcxMjMgMy4zODkyOUMuNzY3MTIzIDMuNDcyOTc2IC44MzY4NjIgMy41MDA4NzIgLjg5MjY1MyAzLjUwMDg3MkMxLjA3Mzk3MyAzLjUwMDg3MiAyLjIxNzY4NCAyLjQ5NjYzOCAyLjkwMTEyMSAxLjEyOTc2M0MzLjYxMjQ1My0uMjkyOTAyIDMuOTMzMjUtMS43OTkyNTMgMy45MzMyNS0zLjQ3Mjk3NlonLz4KPHBhdGggaWQ9J2c1LTQzJyBkPSdNNS41NjUxMzEtMy4yMjE5MThIOS40MTQ2OTVDOS42MDk5NjMtMy4yMjE5MTggOS44NjEwMjEtMy4yMjE5MTggOS44NjEwMjEtMy40NzI5NzZDOS44NjEwMjEtMy43Mzc5ODMgOS42MjM5MS0zLjczNzk4MyA5LjQxNDY5NS0zLjczNzk4M0g1LjU2NTEzMVYtNy41ODc1NDdDNS41NjUxMzEtNy43ODI4MTQgNS41NjUxMzEtOC4wMzM4NzMgNS4zMTQwNzItOC4wMzM4NzNDNS4wNDkwNjYtOC4wMzM4NzMgNS4wNDkwNjYtNy43OTY3NjIgNS4wNDkwNjYtNy41ODc1NDdWLTMuNzM3OTgzSDEuMTk5NTAyQzEuMDA0MjM0LTMuNzM3OTgzIC43NTMxNzYtMy43Mzc5ODMgLjc1MzE3Ni0zLjQ4NjkyNEMuNzUzMTc2LTMuMjIxOTE4IC45OTAyODYtMy4yMjE5MTggMS4xOTk1MDItMy4yMjE5MThINS4wNDkwNjZWLjYyNzY0NkM1LjA0OTA2NiAuODIyOTE0IDUuMDQ5MDY2IDEuMDczOTczIDUuMzAwMTI1IDEuMDczOTczQzUuNTY1MTMxIDEuMDczOTczIDUuNTY1MTMxIC44MzY4NjIgNS41NjUxMzEgLjYyNzY0NlYtMy4yMjE5MThaJy8+CjxwYXRoIGlkPSdnNS00OScgZD0nTTQuMDE2OTM2LTguOTQwNDczQzQuMDE2OTM2LTkuMjYxMjcgNC4wMTY5MzYtOS4yNzUyMTggMy43Mzc5ODMtOS4yNzUyMThDMy40MDMyMzgtOC44OTg2MyAyLjcwNTg1My04LjM4MjU2NSAxLjI2OTI0LTguMzgyNTY1Vi03Ljk3ODA4MkMxLjU5MDAzNy03Ljk3ODA4MiAyLjI4NzQyMi03Ljk3ODA4MiAzLjA1NDU0NS04LjM0MDcyMlYtMS4wNzM5NzNDMy4wNTQ1NDUtLjU3MTg1NiAzLjAxMjcwMi0uNDA0NDgzIDEuNzg1MzA1LS40MDQ0ODNIMS4zNTI5MjdWMEMxLjcyOTUxNC0uMDI3ODk1IDMuMDgyNDQxLS4wMjc4OTUgMy41NDI3MTUtLjAyNzg5NVM1LjM0MTk2OC0uMDI3ODk1IDUuNzE4NTU1IDBWLS40MDQ0ODNINS4yODYxNzdDNC4wNTg3OC0uNDA0NDgzIDQuMDE2OTM2LS41NzE4NTYgNC4wMTY5MzYtMS4wNzM5NzNWLTguOTQwNDczWicvPgo8cGF0aCBpZD0nZzUtNTInIGQ9J001LjAzNTExOC05LjA3OTk1QzUuMDM1MTE4LTkuMzQ0OTU2IDUuMDM1MTE4LTkuNDE0Njk1IDQuODM5ODUxLTkuNDE0Njk1QzQuNzI4MjY5LTkuNDE0Njk1IDQuNjg2NDI2LTkuNDE0Njk1IDQuNTc0ODQ0LTkuMjQ3MzIzTC4zNzY1ODgtMi43MzM3NDhWLTIuMzI5MjY1SDQuMDQ0ODMyVi0xLjA2MDAyNUM0LjA0NDgzMi0uNTQzOTYgNC4wMTY5MzYtLjQwNDQ4MyAyLjk5ODc1NS0uNDA0NDgzSDIuNzE5ODAxVjBDMy4wNDA1OTgtLjAyNzg5NSA0LjE0MjQ2Ni0uMDI3ODk1IDQuNTMzMDAxLS4wMjc4OTVTNi4wMzkzNTItLjAyNzg5NSA2LjM2MDE0OSAwVi0uNDA0NDgzSDYuMDgxMTk2QzUuMDc2OTYxLS40MDQ0ODMgNS4wMzUxMTgtLjU0Mzk2IDUuMDM1MTE4LTEuMDYwMDI1Vi0yLjMyOTI2NUg2LjQ0MzgzNlYtMi43MzM3NDhINS4wMzUxMThWLTkuMDc5OTVaTTQuMTE0NTctNy45OTIwM1YtMi43MzM3NDhILjcyNTI4TDQuMTE0NTctNy45OTIwM1onLz4KPHBhdGggaWQ9J2c1LTYxJyBkPSdNOS40MTQ2OTUtNC41MTkwNTRDOS42MDk5NjMtNC41MTkwNTQgOS44NjEwMjEtNC41MTkwNTQgOS44NjEwMjEtNC43NzAxMTJDOS44NjEwMjEtNS4wMzUxMTggOS42MjM5MS01LjAzNTExOCA5LjQxNDY5NS01LjAzNTExOEgxLjE5OTUwMkMxLjAwNDIzNC01LjAzNTExOCAuNzUzMTc2LTUuMDM1MTE4IC43NTMxNzYtNC43ODQwNkMuNzUzMTc2LTQuNTE5MDU0IC45OTAyODYtNC41MTkwNTQgMS4xOTk1MDItNC41MTkwNTRIOS40MTQ2OTVaTTkuNDE0Njk1LTEuOTI0NzgyQzkuNjA5OTYzLTEuOTI0NzgyIDkuODYxMDIxLTEuOTI0NzgyIDkuODYxMDIxLTIuMTc1ODQxQzkuODYxMDIxLTIuNDQwODQ3IDkuNjIzOTEtMi40NDA4NDcgOS40MTQ2OTUtMi40NDA4NDdIMS4xOTk1MDJDMS4wMDQyMzQtMi40NDA4NDcgLjc1MzE3Ni0yLjQ0MDg0NyAuNzUzMTc2LTIuMTg5Nzg4Qy43NTMxNzYtMS45MjQ3ODIgLjk5MDI4Ni0xLjkyNDc4MiAxLjE5OTUwMi0xLjkyNDc4Mkg5LjQxNDY5NVonLz4KPHBhdGggaWQ9J2c1LTkxJyBkPSdNMy40ODY5MjQgMy40ODY5MjRWMi45NzA4NTlIMi4xMzM5OThWLTkuOTQ0NzA3SDMuNDg2OTI0Vi0xMC40NjA3NzJIMS42MTc5MzNWMy40ODY5MjRIMy40ODY5MjRaJy8+CjxwYXRoIGlkPSdnNS05MycgZD0nTTIuMTYxODkzLTEwLjQ2MDc3MkguMjkyOTAyVi05Ljk0NDcwN0gxLjY0NTgyOFYyLjk3MDg1OUguMjkyOTAyVjMuNDg2OTI0SDIuMTYxODkzVi0xMC40NjA3NzJaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PScxNy43MzQxNTYnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2czLTMwJy8+Cjx1c2UgeD0nMjUuODE2OTQyJyB5PSctMTUuMzI2MzMxJyB4bGluazpocmVmPScjZzItNzYnLz4KPHVzZSB4PScyNS44MTY5NDInIHk9Jy01Ljc3MjI2OScgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzI5LjE4MDU0JyB5PSctNS43NzIyNjknIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzM2Ljc3NDI4JyB5PSctNS43NzIyNjknIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8dXNlIHg9JzQxLjY1NTk3MScgeT0nLTUuNzcyMjY5JyB4bGluazpocmVmPScjZzItNjEnLz4KPHVzZSB4PSc0Ni41Mzc2NjInIHk9Jy01Ljc3MjI2OScgeGxpbms6aHJlZj0nI2c0LTUwJy8+Cjx1c2UgeD0nNTUuNzkxNzg2JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNS02MScvPgo8dXNlIHg9JzcwLjI4ODIwNicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzMtMzAnLz4KPHVzZSB4PSc3OC4zNzA5OTEnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9Jzk3LjgwNzU5NScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDMnLz4KPHVzZSB4PScxMTIuNzI0NjYzJyB5PSctMTkuMDAzMTU1JyB4bGluazpocmVmPScjZzUtNDknLz4KPHJlY3QgeD0nMTEyLjcyNDY2MycgeT0nLTEzLjMzMzMxNicgaGVpZ2h0PScuNTU3ODknIHdpZHRoPSc2LjgyODQ4OScvPgo8dXNlIHg9JzExMi43MjQ2NjMnIHk9Jy0uMDAwMDE1JyB4bGluazpocmVmPScjZzUtNTInLz4KPHVzZSB4PScxMjMuMDczMjYxJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNS05MScvPgo8dXNlIHg9JzEyNi44NjY4NjYnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQwJy8+Cjx1c2UgeD0nMTMyLjE3NzkxMycgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDknLz4KPHVzZSB4PScxNDIuMTA1ODYzJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMTU2LjA1MzU3JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0yMCcvPgo8dXNlIHg9JzE2My45MTUyMTgnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMTcxLjU1MDg0OScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PScxNzYuODYxODk1JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzE4NC45NDQ2ODEnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzE5MS45MDU4NjYnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PScyMDUuODUzNTc0JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzIxMy45MzYzNTknIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzIxNy4yOTk5NTgnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cwLTAnLz4KPHVzZSB4PScyMjQuODkzNjk3JyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8dXNlIHg9JzIzMC4yNzM1MDInIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMjM4LjY4Mzk3MicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDMnLz4KPHVzZSB4PScyNTIuNDA1NTI2JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzI1Ny43MTY1NzMnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQ5Jy8+Cjx1c2UgeD0nMjY3LjY0NDUyMycgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDMnLz4KPHVzZSB4PScyODEuMzY2MDc3JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0yMCcvPgo8dXNlIHg9JzI4OS4yMjc3MjQnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMjk2Ljg2MzM2NycgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PSczMDIuMTc0NDE0JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzMxMC4yNTcxOTknIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzMxMy42MjA3OTgnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2c0LTQzJy8+Cjx1c2UgeD0nMzIxLjIxNDUzNycgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzQtNDknLz4KPHVzZSB4PSczMjkuNjkzODAzJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMzQzLjY0MTUxMScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzMtMzAnLz4KPHVzZSB4PSczNTEuNzI0Mjk2JyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PSczNTUuNTg2MDInIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMzYwLjg5NzAyOScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtOTMnLz4KPHVzZSB4PSczNjcuMDE1MjMnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2czLTU5Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
(3.811)![\phi_{i+1/2}^R = \phi_{i+1} - {1 \over 4} \left[
\left( 1 + \kappa \right) \left( \phi_{i+1} - \phi_{i} \right)
+ \left( 1 - \kappa \right) \left( \phi_{i+2} - \phi_{i+1} \right) \right] ,](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzM2NS43NzYyNXB0JyBoZWlnaHQ9JzI3Ljk5MTY1NnB0JyB2aWV3Qm94PScxMS4zODMzNjggLTI3Ljk5MTY3MSAzNjUuNzc2MjUgMjcuOTkxNjU2Jz4KPGRlZnM+CjxwYXRoIGlkPSdnMC0wJyBkPSdNOS4xOTE1MzItMy4yMDc5N0M5LjQyODY0My0zLjIwNzk3IDkuNjc5NzAxLTMuMjA3OTcgOS42Nzk3MDEtMy40ODY5MjRTOS40Mjg2NDMtMy43NjU4NzggOS4xOTE1MzItMy43NjU4NzhIMS42NDU4MjhDMS40MDg3MTctMy43NjU4NzggMS4xNTc2NTktMy43NjU4NzggMS4xNTc2NTktMy40ODY5MjRTMS40MDg3MTctMy4yMDc5NyAxLjY0NTgyOC0zLjIwNzk3SDkuMTkxNTMyWicvPgo8cGF0aCBpZD0nZzMtNDMnIGQ9J00zLjk5MzIwOC0yLjI0NTU2OUg2LjcxNzE4MUM2Ljg1Mzg2OC0yLjI0NTU2OSA3LjAzOTM3Mi0yLjI0NTU2OSA3LjAzOTM3Mi0yLjQ0MDgzNlM2Ljg1Mzg2OC0yLjYzNjEwMyA2LjcxNzE4MS0yLjYzNjEwM0gzLjk5MzIwOFYtNS4zNjk4NEMzLjk5MzIwOC01LjUwNjUyNiAzLjk5MzIwOC01LjY5MjAzIDMuNzk3OTQxLTUuNjkyMDNTMy42MDI2NzQtNS41MDY1MjYgMy42MDI2NzQtNS4zNjk4NFYtMi42MzYxMDNILjg2ODkzOEMuNzMyMjUxLTIuNjM2MTAzIC41NDY3NDctMi42MzYxMDMgLjU0Njc0Ny0yLjQ0MDgzNlMuNzMyMjUxLTIuMjQ1NTY5IC44Njg5MzgtMi4yNDU1NjlIMy42MDI2NzRWLjQ4ODE2N0MzLjYwMjY3NCAuNjI0ODU0IDMuNjAyNjc0IC44MTAzNTggMy43OTc5NDEgLjgxMDM1OFMzLjk5MzIwOCAuNjI0ODU0IDMuOTkzMjA4IC40ODgxNjdWLTIuMjQ1NTY5WicvPgo8cGF0aCBpZD0nZzMtNDknIGQ9J00yLjg3MDQyMy02LjI0ODU0MUMyLjg3MDQyMy02LjQ4Mjg2MSAyLjg3MDQyMy02LjUwMjM4OCAyLjY0NTg2Ni02LjUwMjM4OEMyLjA0MDUzOS01Ljg3NzUzNCAxLjE4MTM2NS01Ljg3NzUzNCAuODY4OTM4LTUuODc3NTM0Vi01LjU3NDg3QzEuMDY0MjA1LTUuNTc0ODcgMS42NDAyNDItNS41NzQ4NyAyLjE0NzkzNi01LjgyODcxN1YtLjc3MTMwNEMyLjE0NzkzNi0uNDE5ODI0IDIuMTE4NjQ2LS4zMDI2NjQgMS4yMzk5NDUtLjMwMjY2NEguOTI3NTE4VjBDMS4yNjkyMzUtLjAyOTI5IDIuMTE4NjQ2LS4wMjkyOSAyLjUwOTE4LS4wMjkyOVMzLjc0OTEyNC0uMDI5MjkgNC4wOTA4NDEgMFYtLjMwMjY2NEgzLjc3ODQxNEMyLjg5OTcxMy0uMzAyNjY0IDIuODcwNDIzLS40MTAwNiAyLjg3MDQyMy0uNzcxMzA0Vi02LjI0ODU0MVonLz4KPHBhdGggaWQ9J2czLTUwJyBkPSdNMS4yMzk5NDUtLjc1MTc3OEwyLjI3NDg1OS0xLjc1NzQwMkMzLjc5Nzk0MS0zLjEwNDc0NCA0LjM4Mzc0Mi0zLjYzMTk2NCA0LjM4Mzc0Mi00LjYwODI5OUM0LjM4Mzc0Mi01LjcyMTMyIDMuNTA1MDQxLTYuNTAyMzg4IDIuMzEzOTEzLTYuNTAyMzg4QzEuMjEwNjU1LTYuNTAyMzg4IC40ODgxNjctNS42MDQxNiAuNDg4MTY3LTQuNzM1MjIyQy40ODgxNjctNC4xODg0NzUgLjk3NjMzNC00LjE4ODQ3NSAxLjAwNTYyNS00LjE4ODQ3NUMxLjE3MTYwMS00LjE4ODQ3NSAxLjUxMzMxOC00LjMwNTYzNSAxLjUxMzMxOC00LjcwNTkzMkMxLjUxMzMxOC00Ljk1OTc3OSAxLjMzNzU3OC01LjIxMzYyNiAuOTk1ODYxLTUuMjEzNjI2Qy45MTc3NTQtNS4yMTM2MjYgLjg5ODIyOC01LjIxMzYyNiAuODY4OTM4LTUuMjAzODYzQzEuMDkzNDk1LTUuODM4NDggMS42MjA3MTUtNi4xOTk3MjQgMi4xODY5ODktNi4xOTk3MjRDMy4wNzU0NTQtNi4xOTk3MjQgMy40OTUyNzctNS40MDg4OTMgMy40OTUyNzctNC42MDgyOTlDMy40OTUyNzctMy44MjcyMzEgMy4wMDcxMS0zLjA1NTkyNyAyLjQ3MDEyNi0yLjQ1MDZMLjU5NTU2NC0uMzYxMjQ0Qy40ODgxNjctLjI1Mzg0NyAuNDg4MTY3LS4yMzQzMiAuNDg4MTY3IDBINC4xMTAzNjhMNC4zODM3NDItMS42OTg4MjJINC4xMzk2NThDNC4wOTA4NDEtMS40MDU5MjIgNC4wMjI0OTgtLjk3NjMzNCAzLjkyNDg2NS0uODI5ODg0QzMuODU2NTIxLS43NTE3NzggMy4yMTIxNC0uNzUxNzc4IDIuOTk3MzQ3LS43NTE3NzhIMS4yMzk5NDVaJy8+CjxwYXRoIGlkPSdnMi0yMCcgZD0nTTIuOTcwODU5LTMuNDg2OTI0QzMuNDMxMTMzLTMuNzM3OTgzIDMuOTQ3MTk4LTQuMTcwMzYxIDQuMjk1ODktNC40NjMyNjNDNS4xMzI3NTItNS4xODg1NDMgNS40Mzk2MDEtNS40MTE3MDYgNS45Njk2MTQtNS42MjA5MjJDNS45MTM4MjMtNS41MzcyMzUgNS44OTk4NzUtNS40MjU2NTQgNS44OTk4NzUtNS4zMjgwMkM1Ljg5OTg3NS00Ljk1MTQzMiA2LjIyMDY3Mi00Ljg4MTY5NCA2LjM2MDE0OS00Ljg4MTY5NEM2LjgwNjQ3Ni00Ljg4MTY5NCA3LjA1NzUzNC01LjMwMDEyNSA3LjA1NzUzNC01LjU2NTEzMUM3LjA1NzUzNC01LjY0ODgxNyA3LjAyOTYzOS02LjAxMTQ1NyA2LjU0MTQ2OS02LjAxMTQ1N0M1LjcwNDYwOC02LjAxMTQ1NyA0Ljg4MTY5NC01LjMwMDEyNSA0LjI2Nzk5NS00Ljc4NDA2QzMuNDU5MDI5LTQuMDcyNzI3IDMuMDU0NTQ1LTMuNzY1ODc4IDIuNDgyNjktMy41ODQ1NThMMy4wMTI3MDItNS44MDIyNDJDMy4wMTI3MDItNi4wMjU0MDUgMi44MzEzODItNi4xNTA5MzQgMi42NTAwNjItNi4xNTA5MzRDMi41MjQ1MzMtNi4xNTA5MzQgMi4yMTc2ODQtNi4xMDkwOTEgMi4xMDYxMDItNS42NjI3NjVMLjgwODk2Ni0uNDg4MTY5Qy43NjcxMjMtLjMyMDc5NyAuNzY3MTIzLS4yOTI5MDIgLjc2NzEyMy0uMjA5MjE1Qy43NjcxMjMtLjAxMzk0OCAuOTIwNTQ4IC4xMzk0NzcgMS4xMjk3NjMgLjEzOTQ3N0MxLjU0ODE5NCAuMTM5NDc3IDEuNjMxODgtLjIyMzE2MyAxLjcwMTYxOS0uNTE2MDY1QzEuNzg1MzA1LS44MDg5NjYgMi4zNTcxNjEtMy4xMzgyMzIgMi4zODUwNTYtMy4yMjE5MThDNC4xNTY0MTMtMy4xMzgyMzIgNC43NTYxNjQtMi42OTE5MDUgNC43NTYxNjQtMi4wMDg0NjhDNC43NTYxNjQtMS45MTA4MzQgNC43NTYxNjQtMS44Njg5OTEgNC43MTQzMjEtMS43MTU1NjdDNC42NTg1MzEtMS40NTA1NiA0LjY1ODUzMS0xLjI5NzEzNiA0LjY1ODUzMS0xLjIxMzQ1QzQuNjU4NTMxLS4zNzY1ODggNS4yMDI0OTEgLjEzOTQ3NyA1Ljg4NTkyOCAuMTM5NDc3QzYuNDU3NzgzIC4xMzk0NzcgNi43Nzg1OC0uMjY1MDA2IDYuOTg3Nzk2LS42Mjc2NDZDNy4yODA2OTctMS4xNzE2MDYgNy40NjIwMTctMS45Mzg3MyA3LjQ2MjAxNy0xLjk5NDUyMUM3LjQ2MjAxNy0yLjA2NDI1OSA3LjQwNjIyNy0yLjEyMDA1IDcuMzIyNTQtMi4xMjAwNUM3LjE5NzAxMS0yLjEyMDA1IDcuMTgzMDY0LTIuMDY0MjU5IDcuMTI3MjczLTEuODQxMDk2QzYuOTQ1OTUzLTEuMTcxNjA2IDYuNjM5MTAzLS4xMzk0NzcgNS45Mjc3NzEtLjEzOTQ3N0M1LjYyMDkyMi0uMTM5NDc3IDUuNDY3NDk3LS4zMjA3OTcgNS40Njc0OTctLjgwODk2NkM1LjQ2NzQ5Ny0xLjA3Mzk3MyA1LjUyMzI4OC0xLjM4MDgyMiA1LjU3OTA3OC0xLjU5MDAzN0M1LjYwNjk3NC0xLjcyOTUxNCA1LjY0ODgxNy0xLjg5Njg4NyA1LjY0ODgxNy0yLjA1MDMxMUM1LjY0ODgxNy0zLjMxOTU1MiAzLjg5MTQwNy0zLjQ0NTA4MSAyLjk3MDg1OS0zLjQ4NjkyNFonLz4KPHBhdGggaWQ9J2cyLTMwJyBkPSdNNS45OTc1MDktOS41NTQxNzJDNS45OTc1MDktOS42Nzk3MDEgNS44OTk4NzUtOS42Nzk3MDEgNS44NTgwMzItOS42Nzk3MDFDNS43MzI1MDMtOS42Nzk3MDEgNS43MTg1NTUtOS42NTE4MDYgNS42NjI3NjUtOS40MTQ2OTVMNC45MDk1ODktNi40MTU5NEM0Ljg2Nzc0Ni02LjIzNDYyIDQuODUzNzk4LTYuMjIwNjcyIDQuODM5ODUxLTYuMjA2NzI1QzQuODI1OTAzLTYuMTc4ODI5IDQuNzI4MjY5LTYuMTY0ODgyIDQuNzAwMzc0LTYuMTY0ODgyQzIuNDEyOTUxLTUuOTY5NjE0IC42NTU1NDItNC4wODY2NzUgLjY1NTU0Mi0yLjM0MzIxM0MuNjU1NTQyLS44MzY4NjIgMS44MTMyIC4wODM2ODYgMy4yNjM3NjEgLjE2NzM3MkMzLjE1MjE3OSAuNTk5NzUxIDMuMDU0NTQ1IDEuMDQ2MDc3IDIuOTQyOTY0IDEuNDc4NDU2QzIuNzQ3Njk2IDIuMjE3Njg0IDIuNjM2MTE1IDIuNjc3OTU4IDIuNjM2MTE1IDIuNzMzNzQ4QzIuNjM2MTE1IDIuNzYxNjQ0IDIuNjM2MTE1IDIuODQ1MzMgMi43NzU1OTIgMi44NDUzM0MyLjgxNzQzNSAyLjg0NTMzIDIuODczMjI1IDIuODQ1MzMgMi45MDExMjEgMi43ODk1MzlDMi45MjkwMTYgMi43NjE2NDQgMy4wMTI3MDIgMi40MjY4OTkgMy4wNjg0OTMgMi4yNDU1NzlMMy41ODQ1NTggLjE2NzM3MkM1Ljk2OTYxNCAuMDQxODQzIDcuNzgyODE0LTEuOTEwODM0IDcuNzgyODE0LTMuNjY4MjQ0QzcuNzgyODE0LTUuMDc2OTYxIDYuNzIyNzktNi4wODExOTYgNS4xNzQ1OTUtNi4xNzg4MjlMNS45OTc1MDktOS41NTQxNzJaTTUuMDkwOTA5LTUuODk5ODc1QzYuMDExNDU3LTUuODQ0MDg1IDYuOTMyMDA1LTUuMzI4MDIgNi45MzIwMDUtMy45NjExNDZDNi45MzIwMDUtMi4zODUwNTYgNS44MzAxMzctLjI5MjkwMiAzLjY1NDI5Ni0uMTI1NTI5TDUuMDkwOTA5LTUuODk5ODc1Wk0zLjMzMzQ5OS0uMTExNTgyQzIuNjUwMDYyLS4xNTM0MjUgMS41MDYzNTEtLjUxNjA2NSAxLjUwNjM1MS0yLjA1MDMxMUMxLjUwNjM1MS0zLjgwNzcyMSAyLjc3NTU5Mi01Ljc2MDM5OSA0Ljc4NDA2LTUuODg1OTI4TDMuMzMzNDk5LS4xMTE1ODJaJy8+CjxwYXRoIGlkPSdnMi01OScgZD0nTTIuNzE5ODAxIC4wNTU3OTFDMi43MTk4MDEtLjc1MzE3NiAyLjQ1NDc5NS0xLjM1MjkyNyAxLjg4MjkzOS0xLjM1MjkyN0MxLjQzNjYxMy0xLjM1MjkyNyAxLjIxMzQ1LS45OTAyODYgMS4yMTM0NS0uNjgzNDM3UzEuNDIyNjY1IDAgMS44OTY4ODcgMEMyLjA3ODIwNyAwIDIuMjMxNjMxLS4wNTU3OTEgMi4zNTcxNjEtLjE4MTMyQzIuMzg1MDU2LS4yMDkyMTUgMi4zOTkwMDQtLjIwOTIxNSAyLjQxMjk1MS0uMjA5MjE1QzIuNDQwODQ3LS4yMDkyMTUgMi40NDA4NDctLjAxMzk0OCAyLjQ0MDg0NyAuMDU1NzkxQzIuNDQwODQ3IC41MTYwNjUgMi4zNTcxNjEgMS40MjI2NjUgMS41NDgxOTQgMi4zMjkyNjVDMS4zOTQ3NyAyLjQ5NjYzOCAxLjM5NDc3IDIuNTI0NTMzIDEuMzk0NzcgMi41NTI0MjhDMS4zOTQ3NyAyLjYyMjE2NyAxLjQ2NDUwOCAyLjY5MTkwNSAxLjUzNDI0NyAyLjY5MTkwNUMxLjY0NTgyOCAyLjY5MTkwNSAyLjcxOTgwMSAxLjY1OTc3NiAyLjcxOTgwMSAuMDU1NzkxWicvPgo8cGF0aCBpZD0nZzQtNDAnIGQ9J000LjUzMzAwMSAzLjM4OTI5QzQuNTMzMDAxIDMuMzQ3NDQ3IDQuNTMzMDAxIDMuMzE5NTUyIDQuMjk1ODkgMy4wODI0NDFDMi45MDExMjEgMS42NzM3MjQgMi4xMjAwNS0uNjI3NjQ2IDIuMTIwMDUtMy40NzI5NzZDMi4xMjAwNS02LjE3ODgyOSAyLjc3NTU5Mi04LjUwODA5NSA0LjM5MzUyNC0xMC4xNTM5MjNDNC41MzMwMDEtMTAuMjc5NDUyIDQuNTMzMDAxLTEwLjMwNzM0NyA0LjUzMzAwMS0xMC4zNDkxOTFDNC41MzMwMDEtMTAuNDMyODc3IDQuNDYzMjYzLTEwLjQ2MDc3MiA0LjQwNzQ3Mi0xMC40NjA3NzJDNC4yMjYxNTItMTAuNDYwNzcyIDMuMDgyNDQxLTkuNDU2NTM4IDIuMzk5MDA0LTguMDg5NjY0QzEuNjg3NjcxLTYuNjgwOTQ2IDEuMzY2ODc0LTUuMTg4NTQzIDEuMzY2ODc0LTMuNDcyOTc2QzEuMzY2ODc0LTIuMjMxNjMxIDEuNTYyMTQyLS41NzE4NTYgMi4yODc0MjIgLjkyMDU0OEMzLjExMDMzNiAyLjU5NDI3MSA0LjI1NDA0NyAzLjUwMDg3MiA0LjQwNzQ3MiAzLjUwMDg3MkM0LjQ2MzI2MyAzLjUwMDg3MiA0LjUzMzAwMSAzLjQ3Mjk3NiA0LjUzMzAwMSAzLjM4OTI5WicvPgo8cGF0aCBpZD0nZzQtNDEnIGQ9J00zLjkzMzI1LTMuNDcyOTc2QzMuOTMzMjUtNC41MzMwMDEgMy43OTM3NzMtNi4yNjI1MTYgMy4wMTI3MDItNy44ODA0NDhDMi4xODk3ODgtOS41NTQxNzIgMS4wNDYwNzctMTAuNDYwNzcyIC44OTI2NTMtMTAuNDYwNzcyQy44MzY4NjItMTAuNDYwNzcyIC43NjcxMjMtMTAuNDMyODc3IC43NjcxMjMtMTAuMzQ5MTkxQy43NjcxMjMtMTAuMzA3MzQ3IC43NjcxMjMtMTAuMjc5NDUyIDEuMDA0MjM0LTEwLjA0MjM0MUMyLjM5OTAwNC04LjYzMzYyNCAzLjE4MDA3NS02LjMzMjI1NCAzLjE4MDA3NS0zLjQ4NjkyNEMzLjE4MDA3NS0uNzgxMDcxIDIuNTI0NTMzIDEuNTQ4MTk0IC45MDY2IDMuMTk0MDIyQy43NjcxMjMgMy4zMTk1NTIgLjc2NzEyMyAzLjM0NzQ0NyAuNzY3MTIzIDMuMzg5MjlDLjc2NzEyMyAzLjQ3Mjk3NiAuODM2ODYyIDMuNTAwODcyIC44OTI2NTMgMy41MDA4NzJDMS4wNzM5NzMgMy41MDA4NzIgMi4yMTc2ODQgMi40OTY2MzggMi45MDExMjEgMS4xMjk3NjNDMy42MTI0NTMtLjI5MjkwMiAzLjkzMzI1LTEuNzk5MjUzIDMuOTMzMjUtMy40NzI5NzZaJy8+CjxwYXRoIGlkPSdnNC00MycgZD0nTTUuNTY1MTMxLTMuMjIxOTE4SDkuNDE0Njk1QzkuNjA5OTYzLTMuMjIxOTE4IDkuODYxMDIxLTMuMjIxOTE4IDkuODYxMDIxLTMuNDcyOTc2QzkuODYxMDIxLTMuNzM3OTgzIDkuNjIzOTEtMy43Mzc5ODMgOS40MTQ2OTUtMy43Mzc5ODNINS41NjUxMzFWLTcuNTg3NTQ3QzUuNTY1MTMxLTcuNzgyODE0IDUuNTY1MTMxLTguMDMzODczIDUuMzE0MDcyLTguMDMzODczQzUuMDQ5MDY2LTguMDMzODczIDUuMDQ5MDY2LTcuNzk2NzYyIDUuMDQ5MDY2LTcuNTg3NTQ3Vi0zLjczNzk4M0gxLjE5OTUwMkMxLjAwNDIzNC0zLjczNzk4MyAuNzUzMTc2LTMuNzM3OTgzIC43NTMxNzYtMy40ODY5MjRDLjc1MzE3Ni0zLjIyMTkxOCAuOTkwMjg2LTMuMjIxOTE4IDEuMTk5NTAyLTMuMjIxOTE4SDUuMDQ5MDY2Vi42Mjc2NDZDNS4wNDkwNjYgLjgyMjkxNCA1LjA0OTA2NiAxLjA3Mzk3MyA1LjMwMDEyNSAxLjA3Mzk3M0M1LjU2NTEzMSAxLjA3Mzk3MyA1LjU2NTEzMSAuODM2ODYyIDUuNTY1MTMxIC42Mjc2NDZWLTMuMjIxOTE4WicvPgo8cGF0aCBpZD0nZzQtNDknIGQ9J000LjAxNjkzNi04Ljk0MDQ3M0M0LjAxNjkzNi05LjI2MTI3IDQuMDE2OTM2LTkuMjc1MjE4IDMuNzM3OTgzLTkuMjc1MjE4QzMuNDAzMjM4LTguODk4NjMgMi43MDU4NTMtOC4zODI1NjUgMS4yNjkyNC04LjM4MjU2NVYtNy45NzgwODJDMS41OTAwMzctNy45NzgwODIgMi4yODc0MjItNy45NzgwODIgMy4wNTQ1NDUtOC4zNDA3MjJWLTEuMDczOTczQzMuMDU0NTQ1LS41NzE4NTYgMy4wMTI3MDItLjQwNDQ4MyAxLjc4NTMwNS0uNDA0NDgzSDEuMzUyOTI3VjBDMS43Mjk1MTQtLjAyNzg5NSAzLjA4MjQ0MS0uMDI3ODk1IDMuNTQyNzE1LS4wMjc4OTVTNS4zNDE5NjgtLjAyNzg5NSA1LjcxODU1NSAwVi0uNDA0NDgzSDUuMjg2MTc3QzQuMDU4NzgtLjQwNDQ4MyA0LjAxNjkzNi0uNTcxODU2IDQuMDE2OTM2LTEuMDczOTczVi04Ljk0MDQ3M1onLz4KPHBhdGggaWQ9J2c0LTUyJyBkPSdNNS4wMzUxMTgtOS4wNzk5NUM1LjAzNTExOC05LjM0NDk1NiA1LjAzNTExOC05LjQxNDY5NSA0LjgzOTg1MS05LjQxNDY5NUM0LjcyODI2OS05LjQxNDY5NSA0LjY4NjQyNi05LjQxNDY5NSA0LjU3NDg0NC05LjI0NzMyM0wuMzc2NTg4LTIuNzMzNzQ4Vi0yLjMyOTI2NUg0LjA0NDgzMlYtMS4wNjAwMjVDNC4wNDQ4MzItLjU0Mzk2IDQuMDE2OTM2LS40MDQ0ODMgMi45OTg3NTUtLjQwNDQ4M0gyLjcxOTgwMVYwQzMuMDQwNTk4LS4wMjc4OTUgNC4xNDI0NjYtLjAyNzg5NSA0LjUzMzAwMS0uMDI3ODk1UzYuMDM5MzUyLS4wMjc4OTUgNi4zNjAxNDkgMFYtLjQwNDQ4M0g2LjA4MTE5NkM1LjA3Njk2MS0uNDA0NDgzIDUuMDM1MTE4LS41NDM5NiA1LjAzNTExOC0xLjA2MDAyNVYtMi4zMjkyNjVINi40NDM4MzZWLTIuNzMzNzQ4SDUuMDM1MTE4Vi05LjA3OTk1Wk00LjExNDU3LTcuOTkyMDNWLTIuNzMzNzQ4SC43MjUyOEw0LjExNDU3LTcuOTkyMDNaJy8+CjxwYXRoIGlkPSdnNC02MScgZD0nTTkuNDE0Njk1LTQuNTE5MDU0QzkuNjA5OTYzLTQuNTE5MDU0IDkuODYxMDIxLTQuNTE5MDU0IDkuODYxMDIxLTQuNzcwMTEyQzkuODYxMDIxLTUuMDM1MTE4IDkuNjIzOTEtNS4wMzUxMTggOS40MTQ2OTUtNS4wMzUxMThIMS4xOTk1MDJDMS4wMDQyMzQtNS4wMzUxMTggLjc1MzE3Ni01LjAzNTExOCAuNzUzMTc2LTQuNzg0MDZDLjc1MzE3Ni00LjUxOTA1NCAuOTkwMjg2LTQuNTE5MDU0IDEuMTk5NTAyLTQuNTE5MDU0SDkuNDE0Njk1Wk05LjQxNDY5NS0xLjkyNDc4MkM5LjYwOTk2My0xLjkyNDc4MiA5Ljg2MTAyMS0xLjkyNDc4MiA5Ljg2MTAyMS0yLjE3NTg0MUM5Ljg2MTAyMS0yLjQ0MDg0NyA5LjYyMzkxLTIuNDQwODQ3IDkuNDE0Njk1LTIuNDQwODQ3SDEuMTk5NTAyQzEuMDA0MjM0LTIuNDQwODQ3IC43NTMxNzYtMi40NDA4NDcgLjc1MzE3Ni0yLjE4OTc4OEMuNzUzMTc2LTEuOTI0NzgyIC45OTAyODYtMS45MjQ3ODIgMS4xOTk1MDItMS45MjQ3ODJIOS40MTQ2OTVaJy8+CjxwYXRoIGlkPSdnNC05MScgZD0nTTMuNDg2OTI0IDMuNDg2OTI0VjIuOTcwODU5SDIuMTMzOTk4Vi05Ljk0NDcwN0gzLjQ4NjkyNFYtMTAuNDYwNzcySDEuNjE3OTMzVjMuNDg2OTI0SDMuNDg2OTI0WicvPgo8cGF0aCBpZD0nZzQtOTMnIGQ9J00yLjE2MTg5My0xMC40NjA3NzJILjI5MjkwMlYtOS45NDQ3MDdIMS42NDU4MjhWMi45NzA4NTlILjI5MjkwMlYzLjQ4NjkyNEgyLjE2MTg5M1YtMTAuNDYwNzcyWicvPgo8cGF0aCBpZD0nZzEtNjEnIGQ9J000LjI4NjEwOC02Ljk1MTUwMUM0LjMzNDkyNS03LjA3ODQyNSA0LjMzNDkyNS03LjExNzQ3OCA0LjMzNDkyNS03LjEyNzI0MkM0LjMzNDkyNS03LjIzNDYzOCA0LjI0NzA1NS03LjMyMjUwOSA0LjEzOTY1OC03LjMyMjUwOUM0LjA3MTMxNS03LjMyMjUwOSA0LjAwMjk3MS03LjI5MzIxOSAzLjk3MzY4MS03LjIzNDYzOEwuNTg1ODAxIDIuMDY5ODI5Qy41MzY5ODQgMi4xOTY3NTMgLjUzNjk4NCAyLjIzNTgwNiAuNTM2OTg0IDIuMjQ1NTY5Qy41MzY5ODQgMi4zNTI5NjYgLjYyNDg1NCAyLjQ0MDgzNiAuNzMyMjUxIDIuNDQwODM2Qy44NTkxNzQgMi40NDA4MzYgLjg4ODQ2NCAyLjM3MjQ5MyAuOTQ3MDQ0IDIuMjA2NTE2TDQuMjg2MTA4LTYuOTUxNTAxWicvPgo8cGF0aCBpZD0nZzEtODInIGQ9J00zLjY2MTI1NC01Ljk5NDY5NEMzLjcxOTgzNC02LjIyOTAxNCAzLjc0OTEyNC02LjMyNjY0NyAzLjkzNDYyOC02LjM1NTkzN0M0LjAyMjQ5OC02LjM2NTcwMSA0LjMzNDkyNS02LjM2NTcwMSA0LjUzMDE5Mi02LjM2NTcwMUM1LjIyMzM4OS02LjM2NTcwMSA2LjMwNzEyMS02LjM2NTcwMSA2LjMwNzEyMS01LjM5OTEzQzYuMzA3MTIxLTUuMDY3MTc2IDYuMTUwOTA3LTQuMzkzNTA1IDUuNzcwMTM3LTQuMDEyNzM1QzUuNTE2MjktMy43NTg4ODggNC45OTg4MzMtMy40NDY0NjEgNC4xMjAxMzEtMy40NDY0NjFIMy4wMjY2MzdMMy42NjEyNTQtNS45OTQ2OTRaTTUuMDY3MTc2LTMuMzE5NTM3QzYuMDUzMjc0LTMuNTM0MzMxIDcuMjE1MTEyLTQuMjE3NzY1IDcuMjE1MTEyLTUuMjAzODYzQzcuMjE1MTEyLTYuMDQzNTEgNi4zMzY0MTEtNi42NjgzNjQgNS4wNTc0MTMtNi42NjgzNjRIMi4yNzQ4NTlDMi4wNzk1OTItNi42NjgzNjQgMS45OTE3MjItNi42NjgzNjQgMS45OTE3MjItNi40NzMwOThDMS45OTE3MjItNi4zNjU3MDEgMi4wNzk1OTItNi4zNjU3MDEgMi4yNjUwOTYtNi4zNjU3MDFDMi4yODQ2MjMtNi4zNjU3MDEgMi40NzAxMjYtNi4zNjU3MDEgMi42MzYxMDMtNi4zNDYxNzRDMi44MTE4NDMtNi4zMjY2NDcgMi44OTk3MTMtNi4zMTY4ODQgMi44OTk3MTMtNi4xODk5NjFDMi44OTk3MTMtNi4xNTA5MDcgMi44ODk5NS02LjEyMTYxNyAyLjg2MDY2LTYuMDA0NDU3TDEuNTUyMzcyLS43NjE1NDFDMS40NTQ3MzgtLjM4MDc3IDEuNDM1MjEyLS4zMDI2NjQgLjY2MzkwNy0uMzAyNjY0Qy40ODgxNjctLjMwMjY2NCAuNDAwMjk3LS4zMDI2NjQgLjQwMDI5Ny0uMTA3Mzk3Qy40MDAyOTcgMCAuNTE3NDU3IDAgLjUzNjk4NCAwQy44MTAzNTggMCAxLjQ5Mzc5Mi0uMDI5MjkgMS43NjcxNjUtLjAyOTI5UzIuNzMzNzM3IDAgMy4wMDcxMSAwQzMuMDg1MjE3IDAgMy4yMDIzNzcgMCAzLjIwMjM3Ny0uMTk1MjY3QzMuMjAyMzc3LS4zMDI2NjQgMy4xMTQ1MDctLjMwMjY2NCAyLjkyOTAwMy0uMzAyNjY0QzIuNTY3NzYtLjMwMjY2NCAyLjI5NDM4Ni0uMzAyNjY0IDIuMjk0Mzg2LS40Nzg0MDRDMi4yOTQzODYtLjUzNjk4NCAyLjMxMzkxMy0uNTg1ODAxIDIuMzIzNjc2LS42NDQzODFMMi45NjgwNTctMy4yMzE2NjdINC4xMjk4OTVDNS4wMTgzNTktMy4yMzE2NjcgNS4xOTQwOTktMi42ODQ5MiA1LjE5NDA5OS0yLjM0MzIwM0M1LjE5NDA5OS0yLjE5Njc1MyA1LjExNTk5My0xLjg5NDA4OSA1LjA1NzQxMy0xLjY2OTUzMkM0Ljk4OTA2OS0xLjM5NjE1OCA0LjkwMTE5OS0xLjAzNDkxNSA0LjkwMTE5OS0uODM5NjQ4QzQuOTAxMTk5IC4yMTQ3OTQgNi4wNzI4IC4yMTQ3OTQgNi4xOTk3MjQgLjIxNDc5NEM3LjAyOTYwOCAuMjE0Nzk0IDcuMzcxMzI1LS43NzEzMDQgNy4zNzEzMjUtLjkwNzk5MUM3LjM3MTMyNS0xLjAyNTE1MSA3LjI2MzkyOC0xLjAyNTE1MSA3LjI1NDE2NS0xLjAyNTE1MUM3LjE2NjI5NS0xLjAyNTE1MSA3LjE0Njc2OC0uOTU2ODA4IDcuMTI3MjQyLS44ODg0NjRDNi44ODMxNTgtLjE2NTk3NyA2LjQ2MzMzNCAwIDYuMjM4Nzc3IDBDNS45MTY1ODcgMCA1Ljg0ODI0My0uMjE0Nzk0IDUuODQ4MjQzLS41OTU1NjRDNS44NDgyNDMtLjg5ODIyOCA1LjkwNjgyNC0xLjM5NjE1OCA1Ljk0NTg3Ny0xLjcwODU4NUM1Ljk2NTQwNC0xLjg0NTI3MiA1Ljk4NDkzLTIuMDMwNzc2IDUuOTg0OTMtMi4xNjc0NjNDNS45ODQ5My0yLjkxOTI0IDUuMzMwNzg2LTMuMjIxOTA0IDUuMDY3MTc2LTMuMzE5NTM3WicvPgo8cGF0aCBpZD0nZzEtMTA1JyBkPSdNMi43NzI3OS02LjEwMjA5QzIuNzcyNzktNi4yOTczNTcgMi42MzYxMDMtNi40NTM1NzEgMi40MTE1NDYtNi40NTM1NzFDMi4xNDc5MzYtNi40NTM1NzEgMS44ODQzMjYtNi4xOTk3MjQgMS44ODQzMjYtNS45MzYxMTRDMS44ODQzMjYtNS43NTA2MSAyLjAyMTAxMi01LjU4NDYzMyAyLjI1NTMzMy01LjU4NDYzM0MyLjQ3OTg5LTUuNTg0NjMzIDIuNzcyNzktNS44MDkxOSAyLjc3Mjc5LTYuMTAyMDlaTTIuMDMwNzc2LTIuNDMxMDczQzIuMTQ3OTM2LTIuNzE0MjEgMi4xNDc5MzYtMi43MzM3MzcgMi4yNDU1NjktMi45OTczNDdDMi4zMjM2NzYtMy4xOTI2MTQgMi4zNzI0OTMtMy4zMjkzMDEgMi4zNzI0OTMtMy41MTQ4MDRDMi4zNzI0OTMtMy45NTQxNTUgMi4wNjAwNjYtNC4zMTUzOTggMS41NzE4OTktNC4zMTUzOThDLjY1NDE0NC00LjMxNTM5OCAuMjgzMTM3LTIuODk5NzEzIC4yODMxMzctMi44MTE4NDNDLjI4MzEzNy0yLjcxNDIxIC4zODA3Ny0yLjcxNDIxIC40MDAyOTctMi43MTQyMUMuNDk3OTMxLTIuNzE0MjEgLjUwNzY5NC0yLjczMzczNyAuNTU2NTExLTIuODg5OTVDLjgyMDEyMS0zLjgwNzcwNCAxLjIxMDY1NS00LjEwMDYwNSAxLjU0MjYwOC00LjEwMDYwNUMxLjYyMDcxNS00LjEwMDYwNSAxLjc4NjY5Mi00LjEwMDYwNSAxLjc4NjY5Mi0zLjc4ODE3OEMxLjc4NjY5Mi0zLjU4MzE0OCAxLjcxODM0OS0zLjM3ODExNyAxLjY3OTI5NS0zLjI4MDQ4NEMxLjYwMTE4OS0zLjAyNjYzNyAxLjE2MTgzOC0xLjg5NDA4OSAxLjAwNTYyNS0xLjQ3NDI2NUMuOTA3OTkxLTEuMjIwNDE4IC43ODEwNjgtLjg5ODIyOCAuNzgxMDY4LS42OTMxOTdDLjc4MTA2OC0uMjM0MzIgMS4xMTMwMjEgLjEwNzM5NyAxLjU4MTY2MiAuMTA3Mzk3QzIuNDk5NDE2IC4xMDczOTcgMi44NjA2Ni0xLjMwODI4OCAyLjg2MDY2LTEuMzk2MTU4QzIuODYwNjYtMS40OTM3OTIgMi43NzI3OS0xLjQ5Mzc5MiAyLjc0MzUtMS40OTM3OTJDMi42NDU4NjYtMS40OTM3OTIgMi42NDU4NjYtMS40NjQ1MDIgMi41OTcwNS0xLjMxODA1MkMyLjQyMTMwOS0uNzAyOTYxIDIuMDk5MTE5LS4xMDczOTcgMS42MDExODktLjEwNzM5N0MxLjQzNTIxMi0uMTA3Mzk3IDEuMzY2ODY4LS4yMDUwMyAxLjM2Njg2OC0uNDI5NTg3QzEuMzY2ODY4LS42NzM2NzEgMS40MjU0NDgtLjgxMDM1OCAxLjY1MDAwNS0xLjQwNTkyMkwyLjAzMDc3Ni0yLjQzMTA3M1onLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzExLjM4MzM2OCcgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzItMzAnLz4KPHVzZSB4PScxOS40NjYxNTQnIHk9Jy0xNS4zMjYzMzEnIHhsaW5rOmhyZWY9JyNnMS04MicvPgo8dXNlIHg9JzE5LjQ2NjE1NCcgeT0nLTUuNzcyMjY5JyB4bGluazpocmVmPScjZzEtMTA1Jy8+Cjx1c2UgeD0nMjIuODI5NzUzJyB5PSctNS43NzIyNjknIHhsaW5rOmhyZWY9JyNnMy00MycvPgo8dXNlIHg9JzMwLjQyMzQ5MicgeT0nLTUuNzcyMjY5JyB4bGluazpocmVmPScjZzMtNDknLz4KPHVzZSB4PSczNS4zMDUxODMnIHk9Jy01Ljc3MjI2OScgeGxpbms6aHJlZj0nI2cxLTYxJy8+Cjx1c2UgeD0nNDAuMTg2ODc0JyB5PSctNS43NzIyNjknIHhsaW5rOmhyZWY9JyNnMy01MCcvPgo8dXNlIHg9JzQ5LjQ0MDk5OCcgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzQtNjEnLz4KPHVzZSB4PSc2My45Mzc0MTgnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cyLTMwJy8+Cjx1c2UgeD0nNzIuMDIwMjA0JyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMS0xMDUnLz4KPHVzZSB4PSc3NS4zODM4MDInIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2czLTQzJy8+Cjx1c2UgeD0nODIuOTc3NTQyJyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMy00OScvPgo8dXNlIHg9JzkxLjQ1NjgwNycgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzAtMCcvPgo8dXNlIHg9JzEwNi42MDAwMjknIHk9Jy0xOS4wMDMxNTUnIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8cmVjdCB4PScxMDYuNjAwMDI5JyB5PSctMTMuMzMzMzE2JyBoZWlnaHQ9Jy41NTc4OScgd2lkdGg9JzYuODI4NDg5Jy8+Cjx1c2UgeD0nMTA2LjYwMDAyOScgeT0nLS4wMDAwMTUnIHhsaW5rOmhyZWY9JyNnNC01MicvPgo8dXNlIHg9JzExNi45NDg2MjcnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTkxJy8+Cjx1c2UgeD0nMTIwLjc0MjIzMicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzQtNDAnLz4KPHVzZSB4PScxMjYuMDUzMjc4JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8dXNlIHg9JzEzNS45ODEyMjgnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTQzJy8+Cjx1c2UgeD0nMTQ5LjcwMjc4MicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzItMjAnLz4KPHVzZSB4PScxNTcuNTY0NDMnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTQxJy8+Cjx1c2UgeD0nMTY1LjIwMDA3MicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzQtNDAnLz4KPHVzZSB4PScxNzAuNTExMTE5JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMi0zMCcvPgo8dXNlIHg9JzE3OC41OTM5MDUnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cxLTEwNScvPgo8dXNlIHg9JzE4MS45NTc1MDMnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2czLTQzJy8+Cjx1c2UgeD0nMTg5LjU1MTI0MycgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzMtNDknLz4KPHVzZSB4PScxOTguMDMwNTA4JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMC0wJy8+Cjx1c2UgeD0nMjExLjk3ODIxNicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzItMzAnLz4KPHVzZSB4PScyMjAuMDYxMDAyJyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMS0xMDUnLz4KPHVzZSB4PScyMjMuOTIyNzI2JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNC00MScvPgo8dXNlIHg9JzIzMi4zMzMxOTUnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTQzJy8+Cjx1c2UgeD0nMjQ2LjA1NDc1JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNC00MCcvPgo8dXNlIHg9JzI1MS4zNjU3OTcnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTQ5Jy8+Cjx1c2UgeD0nMjYxLjI5Mzc0NicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzAtMCcvPgo8dXNlIHg9JzI3NS4yNDE0NTQnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cyLTIwJy8+Cjx1c2UgeD0nMjgzLjEwMzEwMScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzQtNDEnLz4KPHVzZSB4PScyOTAuNzM4NzMyJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNC00MCcvPgo8dXNlIHg9JzI5Ni4wNDk3NzknIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cyLTMwJy8+Cjx1c2UgeD0nMzA0LjEzMjU2NScgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzEtMTA1Jy8+Cjx1c2UgeD0nMzA3LjQ5NjE2MycgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzMtNDMnLz4KPHVzZSB4PSczMTUuMDg5OTAzJyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMy01MCcvPgo8dXNlIHg9JzMyMy41NjkxNjgnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cwLTAnLz4KPHVzZSB4PSczMzcuNTE2ODc2JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMi0zMCcvPgo8dXNlIHg9JzM0NS41OTk2NjInIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cxLTEwNScvPgo8dXNlIHg9JzM0OC45NjMyNicgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzMtNDMnLz4KPHVzZSB4PSczNTYuNTU3JyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnMy00OScvPgo8dXNlIHg9JzM2MS45MzY4MDQnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c0LTQxJy8+Cjx1c2UgeD0nMzY3LjI0NzgxMycgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzQtOTMnLz4KPHVzZSB4PSczNzMuMzY2MDE0JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMi01OScvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTAgLS0+)
where the  location is between node and node
location is between node and node  .
On a uniform mesh,
.
On a uniform mesh,  gives a third-order scheme. A second-order
upwind scheme is recovered with
gives a third-order scheme. A second-order
upwind scheme is recovered with  and a centered scheme is
recovered with
and a centered scheme is
recovered with  .
.
Limiter functions are introduced to prevent numerical oscillations from occurring.
(3.812)![\tilde{\phi}_{i+1/2}^L = \phi_{i \phantom{+1}} + {1 \over 4} \left[
\left( 1 - \kappa \right) \Phi \left( {1 \over {r_L}} \right)
\left( \phi_{i} - \phi_{i-1} \right)
+ \left( 1 + \kappa \right) \Phi \left( r_L \right)
\left( \phi_{i+1} - \phi_{i} \right) \right] ,](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzQ0OS4zNzY4MzFwdCcgaGVpZ2h0PSczMy40NzQ4MTFwdCcgdmlld0JveD0nMCAtMzMuNDc0OCA0NDkuMzc2ODMxIDMzLjQ3NDgxMSc+CjxkZWZzPgo8dXNlIGlkPSdnMi0wJyB4bGluazpocmVmPScjZzEtMCcgdHJhbnNmb3JtPSdzY2FsZSgxLjQyODU3OCknLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J002LjQzNDA0NC0yLjI0NTU2OUM2LjYwMDAyMS0yLjI0NTU2OSA2Ljc3NTc2MS0yLjI0NTU2OSA2Ljc3NTc2MS0yLjQ0MDgzNlM2LjYwMDAyMS0yLjYzNjEwMyA2LjQzNDA0NC0yLjYzNjEwM0gxLjE1MjA3NUMuOTg2MDk4LTIuNjM2MTAzIC44MTAzNTgtMi42MzYxMDMgLjgxMDM1OC0yLjQ0MDgzNlMuOTg2MDk4LTIuMjQ1NTY5IDEuMTUyMDc1LTIuMjQ1NTY5SDYuNDM0MDQ0WicvPgo8cGF0aCBpZD0nZzQtMjAnIGQ9J00yLjk3MDg1OS0zLjQ4NjkyNEMzLjQzMTEzMy0zLjczNzk4MyAzLjk0NzE5OC00LjE3MDM2MSA0LjI5NTg5LTQuNDYzMjYzQzUuMTMyNzUyLTUuMTg4NTQzIDUuNDM5NjAxLTUuNDExNzA2IDUuOTY5NjE0LTUuNjIwOTIyQzUuOTEzODIzLTUuNTM3MjM1IDUuODk5ODc1LTUuNDI1NjU0IDUuODk5ODc1LTUuMzI4MDJDNS44OTk4NzUtNC45NTE0MzIgNi4yMjA2NzItNC44ODE2OTQgNi4zNjAxNDktNC44ODE2OTRDNi44MDY0NzYtNC44ODE2OTQgNy4wNTc1MzQtNS4zMDAxMjUgNy4wNTc1MzQtNS41NjUxMzFDNy4wNTc1MzQtNS42NDg4MTcgNy4wMjk2MzktNi4wMTE0NTcgNi41NDE0NjktNi4wMTE0NTdDNS43MDQ2MDgtNi4wMTE0NTcgNC44ODE2OTQtNS4zMDAxMjUgNC4yNjc5OTUtNC43ODQwNkMzLjQ1OTAyOS00LjA3MjcyNyAzLjA1NDU0NS0zLjc2NTg3OCAyLjQ4MjY5LTMuNTg0NTU4TDMuMDEyNzAyLTUuODAyMjQyQzMuMDEyNzAyLTYuMDI1NDA1IDIuODMxMzgyLTYuMTUwOTM0IDIuNjUwMDYyLTYuMTUwOTM0QzIuNTI0NTMzLTYuMTUwOTM0IDIuMjE3Njg0LTYuMTA5MDkxIDIuMTA2MTAyLTUuNjYyNzY1TC44MDg5NjYtLjQ4ODE2OUMuNzY3MTIzLS4zMjA3OTcgLjc2NzEyMy0uMjkyOTAyIC43NjcxMjMtLjIwOTIxNUMuNzY3MTIzLS4wMTM5NDggLjkyMDU0OCAuMTM5NDc3IDEuMTI5NzYzIC4xMzk0NzdDMS41NDgxOTQgLjEzOTQ3NyAxLjYzMTg4LS4yMjMxNjMgMS43MDE2MTktLjUxNjA2NUMxLjc4NTMwNS0uODA4OTY2IDIuMzU3MTYxLTMuMTM4MjMyIDIuMzg1MDU2LTMuMjIxOTE4QzQuMTU2NDEzLTMuMTM4MjMyIDQuNzU2MTY0LTIuNjkxOTA1IDQuNzU2MTY0LTIuMDA4NDY4QzQuNzU2MTY0LTEuOTEwODM0IDQuNzU2MTY0LTEuODY4OTkxIDQuNzE0MzIxLTEuNzE1NTY3QzQuNjU4NTMxLTEuNDUwNTYgNC42NTg1MzEtMS4yOTcxMzYgNC42NTg1MzEtMS4yMTM0NUM0LjY1ODUzMS0uMzc2NTg4IDUuMjAyNDkxIC4xMzk0NzcgNS44ODU5MjggLjEzOTQ3N0M2LjQ1Nzc4MyAuMTM5NDc3IDYuNzc4NTgtLjI2NTAwNiA2Ljk4Nzc5Ni0uNjI3NjQ2QzcuMjgwNjk3LTEuMTcxNjA2IDcuNDYyMDE3LTEuOTM4NzMgNy40NjIwMTctMS45OTQ1MjFDNy40NjIwMTctMi4wNjQyNTkgNy40MDYyMjctMi4xMjAwNSA3LjMyMjU0LTIuMTIwMDVDNy4xOTcwMTEtMi4xMjAwNSA3LjE4MzA2NC0yLjA2NDI1OSA3LjEyNzI3My0xLjg0MTA5NkM2Ljk0NTk1My0xLjE3MTYwNiA2LjYzOTEwMy0uMTM5NDc3IDUuOTI3NzcxLS4xMzk0NzdDNS42MjA5MjItLjEzOTQ3NyA1LjQ2NzQ5Ny0uMzIwNzk3IDUuNDY3NDk3LS44MDg5NjZDNS40Njc0OTctMS4wNzM5NzMgNS41MjMyODgtMS4zODA4MjIgNS41NzkwNzgtMS41OTAwMzdDNS42MDY5NzQtMS43Mjk1MTQgNS42NDg4MTctMS44OTY4ODcgNS42NDg4MTctMi4wNTAzMTFDNS42NDg4MTctMy4zMTk1NTIgMy44OTE0MDctMy40NDUwODEgMi45NzA4NTktMy40ODY5MjRaJy8+CjxwYXRoIGlkPSdnNC0zMCcgZD0nTTUuOTk3NTA5LTkuNTU0MTcyQzUuOTk3NTA5LTkuNjc5NzAxIDUuODk5ODc1LTkuNjc5NzAxIDUuODU4MDMyLTkuNjc5NzAxQzUuNzMyNTAzLTkuNjc5NzAxIDUuNzE4NTU1LTkuNjUxODA2IDUuNjYyNzY1LTkuNDE0Njk1TDQuOTA5NTg5LTYuNDE1OTRDNC44Njc3NDYtNi4yMzQ2MiA0Ljg1Mzc5OC02LjIyMDY3MiA0LjgzOTg1MS02LjIwNjcyNUM0LjgyNTkwMy02LjE3ODgyOSA0LjcyODI2OS02LjE2NDg4MiA0LjcwMDM3NC02LjE2NDg4MkMyLjQxMjk1MS01Ljk2OTYxNCAuNjU1NTQyLTQuMDg2Njc1IC42NTU1NDItMi4zNDMyMTNDLjY1NTU0Mi0uODM2ODYyIDEuODEzMiAuMDgzNjg2IDMuMjYzNzYxIC4xNjczNzJDMy4xNTIxNzkgLjU5OTc1MSAzLjA1NDU0NSAxLjA0NjA3NyAyLjk0Mjk2NCAxLjQ3ODQ1NkMyLjc0NzY5NiAyLjIxNzY4NCAyLjYzNjExNSAyLjY3Nzk1OCAyLjYzNjExNSAyLjczMzc0OEMyLjYzNjExNSAyLjc2MTY0NCAyLjYzNjExNSAyLjg0NTMzIDIuNzc1NTkyIDIuODQ1MzNDMi44MTc0MzUgMi44NDUzMyAyLjg3MzIyNSAyLjg0NTMzIDIuOTAxMTIxIDIuNzg5NTM5QzIuOTI5MDE2IDIuNzYxNjQ0IDMuMDEyNzAyIDIuNDI2ODk5IDMuMDY4NDkzIDIuMjQ1NTc5TDMuNTg0NTU4IC4xNjczNzJDNS45Njk2MTQgLjA0MTg0MyA3Ljc4MjgxNC0xLjkxMDgzNCA3Ljc4MjgxNC0zLjY2ODI0NEM3Ljc4MjgxNC01LjA3Njk2MSA2LjcyMjc5LTYuMDgxMTk2IDUuMTc0NTk1LTYuMTc4ODI5TDUuOTk3NTA5LTkuNTU0MTcyWk01LjA5MDkwOS01Ljg5OTg3NUM2LjAxMTQ1Ny01Ljg0NDA4NSA2LjkzMjAwNS01LjMyODAyIDYuOTMyMDA1LTMuOTYxMTQ2QzYuOTMyMDA1LTIuMzg1MDU2IDUuODMwMTM3LS4yOTI5MDIgMy42NTQyOTYtLjEyNTUyOUw1LjA5MDkwOS01Ljg5OTg3NVpNMy4zMzM0OTktLjExMTU4MkMyLjY1MDA2Mi0uMTUzNDI1IDEuNTA2MzUxLS41MTYwNjUgMS41MDYzNTEtMi4wNTAzMTFDMS41MDYzNTEtMy44MDc3MjEgMi43NzU1OTItNS43NjAzOTkgNC43ODQwNi01Ljg4NTkyOEwzLjMzMzQ5OS0uMTExNTgyWicvPgo8cGF0aCBpZD0nZzQtNTknIGQ9J00yLjcxOTgwMSAuMDU1NzkxQzIuNzE5ODAxLS43NTMxNzYgMi40NTQ3OTUtMS4zNTI5MjcgMS44ODI5MzktMS4zNTI5MjdDMS40MzY2MTMtMS4zNTI5MjcgMS4yMTM0NS0uOTkwMjg2IDEuMjEzNDUtLjY4MzQzN1MxLjQyMjY2NSAwIDEuODk2ODg3IDBDMi4wNzgyMDcgMCAyLjIzMTYzMS0uMDU1NzkxIDIuMzU3MTYxLS4xODEzMkMyLjM4NTA1Ni0uMjA5MjE1IDIuMzk5MDA0LS4yMDkyMTUgMi40MTI5NTEtLjIwOTIxNUMyLjQ0MDg0Ny0uMjA5MjE1IDIuNDQwODQ3LS4wMTM5NDggMi40NDA4NDcgLjA1NTc5MUMyLjQ0MDg0NyAuNTE2MDY1IDIuMzU3MTYxIDEuNDIyNjY1IDEuNTQ4MTk0IDIuMzI5MjY1QzEuMzk0NzcgMi40OTY2MzggMS4zOTQ3NyAyLjUyNDUzMyAxLjM5NDc3IDIuNTUyNDI4QzEuMzk0NzcgMi42MjIxNjcgMS40NjQ1MDggMi42OTE5MDUgMS41MzQyNDcgMi42OTE5MDVDMS42NDU4MjggMi42OTE5MDUgMi43MTk4MDEgMS42NTk3NzYgMi43MTk4MDEgLjA1NTc5MVonLz4KPHBhdGggaWQ9J2c0LTExNCcgZD0nTTUuNDI1NjU0LTUuNzA0NjA4QzQuOTkzMjc1LTUuNjIwOTIyIDQuNzcwMTEyLTUuMzE0MDcyIDQuNzcwMTEyLTUuMDA3MjIzQzQuNzcwMTEyLTQuNjcyNDc4IDUuMDM1MTE4LTQuNTYwODk3IDUuMjMwMzg2LTQuNTYwODk3QzUuNjIwOTIyLTQuNTYwODk3IDUuOTQxNzE5LTQuODk1NjQxIDUuOTQxNzE5LTUuMzE0MDcyQzUuOTQxNzE5LTUuNzYwMzk5IDUuNTA5MzQtNi4xNTA5MzQgNC44MTE5NTUtNi4xNTA5MzRDNC4yNTQwNDctNi4xNTA5MzQgMy42MTI0NTMtNS44OTk4NzUgMy4wMjY2NS01LjA0OTA2NkMyLjkyOTAxNi01Ljc4ODI5NCAyLjM3MTEwOC02LjE1MDkzNCAxLjgxMzItNi4xNTA5MzRDMS4yNjkyNC02LjE1MDkzNCAuOTkwMjg2LTUuNzMyNTAzIC44MjI5MTQtNS40MjU2NTRDLjU4NTgwMy00LjkyMzUzNyAuMzc2NTg4LTQuMDg2Njc1IC4zNzY1ODgtNC4wMTY5MzZDLjM3NjU4OC0zLjk2MTE0NiAuNDMyMzc5LTMuODkxNDA3IC41MzAwMTItMy44OTE0MDdDLjY0MTU5NC0zLjg5MTQwNyAuNjU1NTQyLTMuOTA1MzU1IC43MzkyMjgtNC4yMjYxNTJDLjk0ODQ0My01LjA2MzAxNCAxLjIxMzQ1LTUuODcxOTggMS43NzEzNTctNS44NzE5OEMyLjEwNjEwMi01Ljg3MTk4IDIuMjAzNzM2LTUuNjM0ODY5IDIuMjAzNzM2LTUuMjMwMzg2QzIuMjAzNzM2LTQuOTIzNTM3IDIuMDY0MjU5LTQuMzc5NTc3IDEuOTY2NjI1LTMuOTQ3MTk4TDEuNTc2MDktMi40NDA4NDdDMS41MjAyOTktMi4xNzU4NDEgMS4zNjY4NzQtMS41NDgxOTQgMS4yOTcxMzYtMS4yOTcxMzZDMS4xOTk1MDItLjkzNDQ5NiAxLjA0NjA3Ny0uMjc4OTU0IDEuMDQ2MDc3LS4yMDkyMTVDMS4wNDYwNzctLjAxMzk0OCAxLjE5OTUwMiAuMTM5NDc3IDEuNDA4NzE3IC4xMzk0NzdDMS41NjIxNDIgLjEzOTQ3NyAxLjgyNzE0OCAuMDQxODQzIDEuOTEwODM0LS4yMzcxMTFDMS45NTI2NzctLjM0ODY5MiAyLjQ2ODc0Mi0yLjQ1NDc5NSAyLjU1MjQyOC0yLjc3NTU5MkMyLjYyMjE2Ny0zLjA4MjQ0MSAyLjcwNTg1My0zLjM3NTM0MiAyLjc3NTU5Mi0zLjY4MjE5MkMyLjgzMTM4Mi0zLjg3NzQ2IDIuODg3MTczLTQuMTAwNjIzIDIuOTI5MDE2LTQuMjgxOTQzQzIuOTcwODU5LTQuNDA3NDcyIDMuMzQ3NDQ3LTUuMDkwOTA5IDMuNjk2MTM5LTUuMzk3NzU4QzMuODYzNTEyLTUuNTUxMTgzIDQuMjI2MTUyLTUuODcxOTggNC43OTgwMDctNS44NzE5OEM1LjAyMTE3MS01Ljg3MTk4IDUuMjQ0MzM0LTUuODMwMTM3IDUuNDI1NjU0LTUuNzA0NjA4WicvPgo8cGF0aCBpZD0nZzYtOCcgZD0nTTUuNDI1NjU0LTEuODQxMDk2QzcuNTQ1NzA0LTIuMDIyNDE2IDkuMDkzODk4LTMuMzE5NTUyIDkuMDkzODk4LTQuNzU2MTY0QzkuMDkzODk4LTYuMjQ4NTY4IDcuNTAzODYxLTcuNTAzODYxIDUuNDI1NjU0LTcuNjg1MTgxVi04LjQ1MjMwNEM1LjQyNTY1NC04Ljk1NDQyMSA1LjQ1MzU0OS05LjEyMTc5MyA2LjY2Njk5OS05LjEyMTc5M0g3LjA4NTQzVi05LjUyNjI3NkM2LjcwODg0Mi05LjQ5ODM4MSA1LjM1NTkxNS05LjQ5ODM4MSA0Ljg5NTY0MS05LjQ5ODM4MVMzLjA4MjQ0MS05LjQ5ODM4MSAyLjcwNTg1My05LjUyNjI3NlYtOS4xMjE3OTNIMy4xMjQyODRDNC4zMzc3MzMtOS4xMjE3OTMgNC4zNjU2MjktOC45NTQ0MjEgNC4zNjU2MjktOC40NTIzMDRWLTcuNjcxMjMzQzIuMjAzNzM2LTcuNDc1OTY1IC43NTMxNzYtNi4xNTA5MzQgLjc1MzE3Ni00Ljc3MDExMkMuNzUzMTc2LTMuMzMzNDk5IDIuMjQ1NTc5LTIuMDUwMzExIDQuMzY1NjI5LTEuODU1MDQ0Vi0xLjA3Mzk3M0M0LjM2NTYyOS0uNTcxODU2IDQuMzM3NzMzLS40MDQ0ODMgMy4xMjQyODQtLjQwNDQ4M0gyLjcwNTg1M1YwQzMuMDgyNDQxLS4wMjc4OTUgNC40MzUzNjctLjAyNzg5NSA0Ljg5NTY0MS0uMDI3ODk1UzYuNzA4ODQyLS4wMjc4OTUgNy4wODU0MyAwVi0uNDA0NDgzSDYuNjY2OTk5QzUuNDUzNTQ5LS40MDQ0ODMgNS40MjU2NTQtLjU3MTg1NiA1LjQyNTY1NC0xLjA3Mzk3M1YtMS44NDEwOTZaTTQuMzY1NjI5LTIuMTQ3OTQ1QzIuODQ1MzMtMi4zNDMyMTMgMi4wMjI0MTYtMy4yMzU4NjYgMi4wMjI0MTYtNC43NTYxNjRDMi4wMjI0MTYtNi4yOTA0MTEgMi44MzEzODItNy4xODMwNjQgNC4zNjU2MjktNy4zNzgzMzFWLTIuMTQ3OTQ1Wk01LjQyNTY1NC03LjM5MjI3OUM3LjA1NzUzNC03LjE4MzA2NCA3LjgyNDY1OC02LjI0ODU2OCA3LjgyNDY1OC00Ljc3MDExMkM3LjgyNDY1OC0zLjMxOTU1MiA3LjExMzMyNS0yLjM1NzE2MSA1LjQyNTY1NC0yLjEzMzk5OFYtNy4zOTIyNzlaJy8+CjxwYXRoIGlkPSdnNi00MCcgZD0nTTQuNTMzMDAxIDMuMzg5MjlDNC41MzMwMDEgMy4zNDc0NDcgNC41MzMwMDEgMy4zMTk1NTIgNC4yOTU4OSAzLjA4MjQ0MUMyLjkwMTEyMSAxLjY3MzcyNCAyLjEyMDA1LS42Mjc2NDYgMi4xMjAwNS0zLjQ3Mjk3NkMyLjEyMDA1LTYuMTc4ODI5IDIuNzc1NTkyLTguNTA4MDk1IDQuMzkzNTI0LTEwLjE1MzkyM0M0LjUzMzAwMS0xMC4yNzk0NTIgNC41MzMwMDEtMTAuMzA3MzQ3IDQuNTMzMDAxLTEwLjM0OTE5MUM0LjUzMzAwMS0xMC40MzI4NzcgNC40NjMyNjMtMTAuNDYwNzcyIDQuNDA3NDcyLTEwLjQ2MDc3MkM0LjIyNjE1Mi0xMC40NjA3NzIgMy4wODI0NDEtOS40NTY1MzggMi4zOTkwMDQtOC4wODk2NjRDMS42ODc2NzEtNi42ODA5NDYgMS4zNjY4NzQtNS4xODg1NDMgMS4zNjY4NzQtMy40NzI5NzZDMS4zNjY4NzQtMi4yMzE2MzEgMS41NjIxNDItLjU3MTg1NiAyLjI4NzQyMiAuOTIwNTQ4QzMuMTEwMzM2IDIuNTk0MjcxIDQuMjU0MDQ3IDMuNTAwODcyIDQuNDA3NDcyIDMuNTAwODcyQzQuNDYzMjYzIDMuNTAwODcyIDQuNTMzMDAxIDMuNDcyOTc2IDQuNTMzMDAxIDMuMzg5MjlaJy8+CjxwYXRoIGlkPSdnNi00MScgZD0nTTMuOTMzMjUtMy40NzI5NzZDMy45MzMyNS00LjUzMzAwMSAzLjc5Mzc3My02LjI2MjUxNiAzLjAxMjcwMi03Ljg4MDQ0OEMyLjE4OTc4OC05LjU1NDE3MiAxLjA0NjA3Ny0xMC40NjA3NzIgLjg5MjY1My0xMC40NjA3NzJDLjgzNjg2Mi0xMC40NjA3NzIgLjc2NzEyMy0xMC40MzI4NzcgLjc2NzEyMy0xMC4zNDkxOTFDLjc2NzEyMy0xMC4zMDczNDcgLjc2NzEyMy0xMC4yNzk0NTIgMS4wMDQyMzQtMTAuMDQyMzQxQzIuMzk5MDA0LTguNjMzNjI0IDMuMTgwMDc1LTYuMzMyMjU0IDMuMTgwMDc1LTMuNDg2OTI0QzMuMTgwMDc1LS43ODEwNzEgMi41MjQ1MzMgMS41NDgxOTQgLjkwNjYgMy4xOTQwMjJDLjc2NzEyMyAzLjMxOTU1MiAuNzY3MTIzIDMuMzQ3NDQ3IC43NjcxMjMgMy4zODkyOUMuNzY3MTIzIDMuNDcyOTc2IC44MzY4NjIgMy41MDA4NzIgLjg5MjY1MyAzLjUwMDg3MkMxLjA3Mzk3MyAzLjUwMDg3MiAyLjIxNzY4NCAyLjQ5NjYzOCAyLjkwMTEyMSAxLjEyOTc2M0MzLjYxMjQ1My0uMjkyOTAyIDMuOTMzMjUtMS43OTkyNTMgMy45MzMyNS0zLjQ3Mjk3NlonLz4KPHBhdGggaWQ9J2c2LTQzJyBkPSdNNS41NjUxMzEtMy4yMjE5MThIOS40MTQ2OTVDOS42MDk5NjMtMy4yMjE5MTggOS44NjEwMjEtMy4yMjE5MTggOS44NjEwMjEtMy40NzI5NzZDOS44NjEwMjEtMy43Mzc5ODMgOS42MjM5MS0zLjczNzk4MyA5LjQxNDY5NS0zLjczNzk4M0g1LjU2NTEzMVYtNy41ODc1NDdDNS41NjUxMzEtNy43ODI4MTQgNS41NjUxMzEtOC4wMzM4NzMgNS4zMTQwNzItOC4wMzM4NzNDNS4wNDkwNjYtOC4wMzM4NzMgNS4wNDkwNjYtNy43OTY3NjIgNS4wNDkwNjYtNy41ODc1NDdWLTMuNzM3OTgzSDEuMTk5NTAyQzEuMDA0MjM0LTMuNzM3OTgzIC43NTMxNzYtMy43Mzc5ODMgLjc1MzE3Ni0zLjQ4NjkyNEMuNzUzMTc2LTMuMjIxOTE4IC45OTAyODYtMy4yMjE5MTggMS4xOTk1MDItMy4yMjE5MThINS4wNDkwNjZWLjYyNzY0NkM1LjA0OTA2NiAuODIyOTE0IDUuMDQ5MDY2IDEuMDczOTczIDUuMzAwMTI1IDEuMDczOTczQzUuNTY1MTMxIDEuMDczOTczIDUuNTY1MTMxIC44MzY4NjIgNS41NjUxMzEgLjYyNzY0NlYtMy4yMjE5MThaJy8+CjxwYXRoIGlkPSdnNi00OScgZD0nTTQuMDE2OTM2LTguOTQwNDczQzQuMDE2OTM2LTkuMjYxMjcgNC4wMTY5MzYtOS4yNzUyMTggMy43Mzc5ODMtOS4yNzUyMThDMy40MDMyMzgtOC44OTg2MyAyLjcwNTg1My04LjM4MjU2NSAxLjI2OTI0LTguMzgyNTY1Vi03Ljk3ODA4MkMxLjU5MDAzNy03Ljk3ODA4MiAyLjI4NzQyMi03Ljk3ODA4MiAzLjA1NDU0NS04LjM0MDcyMlYtMS4wNzM5NzNDMy4wNTQ1NDUtLjU3MTg1NiAzLjAxMjcwMi0uNDA0NDgzIDEuNzg1MzA1LS40MDQ0ODNIMS4zNTI5MjdWMEMxLjcyOTUxNC0uMDI3ODk1IDMuMDgyNDQxLS4wMjc4OTUgMy41NDI3MTUtLjAyNzg5NVM1LjM0MTk2OC0uMDI3ODk1IDUuNzE4NTU1IDBWLS40MDQ0ODNINS4yODYxNzdDNC4wNTg3OC0uNDA0NDgzIDQuMDE2OTM2LS41NzE4NTYgNC4wMTY5MzYtMS4wNzM5NzNWLTguOTQwNDczWicvPgo8cGF0aCBpZD0nZzYtNTInIGQ9J001LjAzNTExOC05LjA3OTk1QzUuMDM1MTE4LTkuMzQ0OTU2IDUuMDM1MTE4LTkuNDE0Njk1IDQuODM5ODUxLTkuNDE0Njk1QzQuNzI4MjY5LTkuNDE0Njk1IDQuNjg2NDI2LTkuNDE0Njk1IDQuNTc0ODQ0LTkuMjQ3MzIzTC4zNzY1ODgtMi43MzM3NDhWLTIuMzI5MjY1SDQuMDQ0ODMyVi0xLjA2MDAyNUM0LjA0NDgzMi0uNTQzOTYgNC4wMTY5MzYtLjQwNDQ4MyAyLjk5ODc1NS0uNDA0NDgzSDIuNzE5ODAxVjBDMy4wNDA1OTgtLjAyNzg5NSA0LjE0MjQ2Ni0uMDI3ODk1IDQuNTMzMDAxLS4wMjc4OTVTNi4wMzkzNTItLjAyNzg5NSA2LjM2MDE0OSAwVi0uNDA0NDgzSDYuMDgxMTk2QzUuMDc2OTYxLS40MDQ0ODMgNS4wMzUxMTgtLjU0Mzk2IDUuMDM1MTE4LTEuMDYwMDI1Vi0yLjMyOTI2NUg2LjQ0MzgzNlYtMi43MzM3NDhINS4wMzUxMThWLTkuMDc5OTVaTTQuMTE0NTctNy45OTIwM1YtMi43MzM3NDhILjcyNTI4TDQuMTE0NTctNy45OTIwM1onLz4KPHBhdGggaWQ9J2c2LTYxJyBkPSdNOS40MTQ2OTUtNC41MTkwNTRDOS42MDk5NjMtNC41MTkwNTQgOS44NjEwMjEtNC41MTkwNTQgOS44NjEwMjEtNC43NzAxMTJDOS44NjEwMjEtNS4wMzUxMTggOS42MjM5MS01LjAzNTExOCA5LjQxNDY5NS01LjAzNTExOEgxLjE5OTUwMkMxLjAwNDIzNC01LjAzNTExOCAuNzUzMTc2LTUuMDM1MTE4IC43NTMxNzYtNC43ODQwNkMuNzUzMTc2LTQuNTE5MDU0IC45OTAyODYtNC41MTkwNTQgMS4xOTk1MDItNC41MTkwNTRIOS40MTQ2OTVaTTkuNDE0Njk1LTEuOTI0NzgyQzkuNjA5OTYzLTEuOTI0NzgyIDkuODYxMDIxLTEuOTI0NzgyIDkuODYxMDIxLTIuMTc1ODQxQzkuODYxMDIxLTIuNDQwODQ3IDkuNjIzOTEtMi40NDA4NDcgOS40MTQ2OTUtMi40NDA4NDdIMS4xOTk1MDJDMS4wMDQyMzQtMi40NDA4NDcgLjc1MzE3Ni0yLjQ0MDg0NyAuNzUzMTc2LTIuMTg5Nzg4Qy43NTMxNzYtMS45MjQ3ODIgLjk5MDI4Ni0xLjkyNDc4MiAxLjE5OTUwMi0xLjkyNDc4Mkg5LjQxNDY5NVonLz4KPHBhdGggaWQ9J2c2LTEyNicgZD0nTTUuNDgxNDQ1LTkuMjYxMjdDNS4wNzY5NjEtOC44NTY3ODcgNC43ODQwNi04LjU3NzgzMyA0LjMzNzczMy04LjU3NzgzM0M0LjEyODUxOC04LjU3NzgzMyAzLjkzMzI1LTguNjE5Njc2IDMuNTAwODcyLTguOTEyNTc4QzMuMjIxOTE4LTkuMDc5OTUgMi45NDI5NjQtOS4yNjEyNyAyLjYyMjE2Ny05LjI2MTI3QzIuMTA2MTAyLTkuMjYxMjcgMS43OTkyNTMtOC45MTI1NzggMS4xNDM3MTEtOC4xODcyOThMMS4zMzg5NzktNy45OTIwM0MxLjc0MzQ2Mi04LjM5NjUxMyAyLjAzNjM2NC04LjY3NTQ2NyAyLjQ4MjY5LTguNjc1NDY3QzIuNjkxOTA1LTguNjc1NDY3IDIuODg3MTczLTguNjMzNjI0IDMuMzE5NTUyLTguMzQwNzIyQzMuNTk4NTA2LTguMTczMzUgMy44Nzc0Ni03Ljk5MjAzIDQuMTk4MjU3LTcuOTkyMDNDNC43MTQzMjEtNy45OTIwMyA1LjAyMTE3MS04LjM0MDcyMiA1LjY3NjcxMi05LjA2NjAwMkw1LjQ4MTQ0NS05LjI2MTI3WicvPgo8cGF0aCBpZD0nZzAtMTgnIGQ9J005Ljc2MzM4NyAzMi43NjMxMzhDOS43NjMzODcgMzIuNzA3MzQ3IDkuNzM1NDkyIDMyLjY3OTQ1MiA5LjcwNzU5NyAzMi42Mzc2MDlDOS4xOTE1MzIgMzIuMTIxNTQ0IDguMjU3MDM2IDMxLjE4NzA0OSA3LjMyMjU0IDI5LjY4MDY5N0M1LjA3Njk2MSAyNi4wODIxOTIgNC4wNTg3OCAyMS41NDkxOTEgNC4wNTg3OCAxNi4xNzkzMjhDNC4wNTg3OCAxMi40MjczOTcgNC41NjA4OTcgNy41ODc1NDcgNi44NjIyNjcgMy40MzExMzNDNy45NjQxMzQgMS40NTA1NiA5LjEwNzg0NiAuMzA2ODQ5IDkuNzIxNTQ0LS4zMDY4NDlDOS43NjMzODctLjM0ODY5MiA5Ljc2MzM4Ny0uMzc2NTg4IDkuNzYzMzg3LS40MTg0MzFDOS43NjMzODctLjU1NzkwOCA5LjY2NTc1My0uNTU3OTA4IDkuNDcwNDg2LS41NTc5MDhTOS4yNDczMjMtLjU1NzkwOCA5LjAzODEwNy0uMzQ4NjkyQzQuMzY1NjI5IDMuOTA1MzU1IDIuOTAxMTIxIDEwLjI5MzQgMi45MDExMjEgMTYuMTY1MzhDMi45MDExMjEgMjEuNjQ2ODI0IDQuMTU2NDEzIDI3LjE3MDExMiA3LjY5OTEyOCAzMS4zNDA0NzNDNy45NzgwODIgMzEuNjYxMjcgOC41MDgwOTUgMzIuMjMzMTI2IDkuMDc5OTUgMzIuNzM1MjQzQzkuMjQ3MzIzIDMyLjkwMjYxNSA5LjI3NTIxOCAzMi45MDI2MTUgOS40NzA0ODYgMzIuOTAyNjE1UzkuNzYzMzg3IDMyLjkwMjYxNSA5Ljc2MzM4NyAzMi43NjMxMzhaJy8+CjxwYXRoIGlkPSdnMC0xOScgZD0nTTcuMzUwNDM2IDE2LjE3OTMyOEM3LjM1MDQzNiAxMC42OTc4ODMgNi4wOTUxNDMgNS4xNzQ1OTUgMi41NTI0MjggMS4wMDQyMzRDMi4yNzM0NzQgLjY4MzQzNyAxLjc0MzQ2MiAuMTExNTgyIDEuMTcxNjA2LS4zOTA1MzVDMS4wMDQyMzQtLjU1NzkwOCAuOTc2MzM5LS41NTc5MDggLjc4MTA3MS0uNTU3OTA4Qy42MTM2OTktLjU1NzkwOCAuNDg4MTY5LS41NTc5MDggLjQ4ODE2OS0uNDE4NDMxQy40ODgxNjktLjM2MjY0IC41NDM5Ni0uMzA2ODQ5IC41NzE4NTYtLjI3ODk1NEMxLjA2MDAyNSAuMjIzMTYzIDEuOTk0NTIxIDEuMTU3NjU5IDIuOTI5MDE2IDIuNjY0MDFDNS4xNzQ1OTUgNi4yNjI1MTYgNi4xOTI3NzcgMTAuNzk1NTE3IDYuMTkyNzc3IDE2LjE2NTM4QzYuMTkyNzc3IDE5LjkxNzMxIDUuNjkwNjYgMjQuNzU3MTYxIDMuMzg5MjkgMjguOTEzNTc0QzIuMjg3NDIyIDMwLjg5NDE0NyAxLjEyOTc2MyAzMi4wNTE4MDYgLjU0Mzk2IDMyLjYzNzYwOUMuNTE2MDY1IDMyLjY3OTQ1MiAuNDg4MTY5IDMyLjcyMTI5NSAuNDg4MTY5IDMyLjc2MzEzOEMuNDg4MTY5IDMyLjkwMjYxNSAuNjEzNjk5IDMyLjkwMjYxNSAuNzgxMDcxIDMyLjkwMjYxNUMuOTc2MzM5IDMyLjkwMjYxNSAxLjAwNDIzNCAzMi45MDI2MTUgMS4yMTM0NSAzMi42OTM0QzUuODg1OTI4IDI4LjQzOTM1MiA3LjM1MDQzNiAyMi4wNTEzMDggNy4zNTA0MzYgMTYuMTc5MzI4WicvPgo8cGF0aCBpZD0nZzAtMjAnIGQ9J00zLjQ4NjkyNCAzMi45MDI2MTVINy4xNTUxNjhWMzIuMTM1NDkySDQuMjU0MDQ3Vi4yMDkyMTVINy4xNTUxNjhWLS41NTc5MDhIMy40ODY5MjRWMzIuOTAyNjE1WicvPgo8cGF0aCBpZD0nZzAtMjEnIGQ9J00zLjA5NjM4OSAzMi4xMzU0OTJILjE5NTI2OFYzMi45MDI2MTVIMy44NjM1MTJWLS41NTc5MDhILjE5NTI2OFYuMjA5MjE1SDMuMDk2Mzg5VjMyLjEzNTQ5MlonLz4KPHBhdGggaWQ9J2czLTYxJyBkPSdNNC4yODYxMDgtNi45NTE1MDFDNC4zMzQ5MjUtNy4wNzg0MjUgNC4zMzQ5MjUtNy4xMTc0NzggNC4zMzQ5MjUtNy4xMjcyNDJDNC4zMzQ5MjUtNy4yMzQ2MzggNC4yNDcwNTUtNy4zMjI1MDkgNC4xMzk2NTgtNy4zMjI1MDlDNC4wNzEzMTUtNy4zMjI1MDkgNC4wMDI5NzEtNy4yOTMyMTkgMy45NzM2ODEtNy4yMzQ2MzhMLjU4NTgwMSAyLjA2OTgyOUMuNTM2OTg0IDIuMTk2NzUzIC41MzY5ODQgMi4yMzU4MDYgLjUzNjk4NCAyLjI0NTU2OUMuNTM2OTg0IDIuMzUyOTY2IC42MjQ4NTQgMi40NDA4MzYgLjczMjI1MSAyLjQ0MDgzNkMuODU5MTc0IDIuNDQwODM2IC44ODg0NjQgMi4zNzI0OTMgLjk0NzA0NCAyLjIwNjUxNkw0LjI4NjEwOC02Ljk1MTUwMVonLz4KPHBhdGggaWQ9J2czLTc2JyBkPSdNMy42NTE0OTEtNS45MDY4MjRDMy43MzkzNjEtNi4yNTgzMDQgMy43Njg2NTEtNi4zNjU3MDEgNC42ODY0MDUtNi4zNjU3MDFDNC45NzkzMDYtNi4zNjU3MDEgNS4wNTc0MTMtNi4zNjU3MDEgNS4wNTc0MTMtNi41NTEyMDRDNS4wNTc0MTMtNi42NjgzNjQgNC45NTAwMTYtNi42NjgzNjQgNC45MDExOTktNi42NjgzNjRDNC41NzkwMDktNi42NjgzNjQgMy43Nzg0MTQtNi42MzkwNzQgMy40NTYyMjQtNi42MzkwNzRDMy4xNjMzMjQtNi42MzkwNzQgMi40NTA2LTYuNjY4MzY0IDIuMTU3Njk5LTYuNjY4MzY0QzIuMDg5MzU2LTYuNjY4MzY0IDEuOTcyMTk2LTYuNjY4MzY0IDEuOTcyMTk2LTYuNDczMDk4QzEuOTcyMTk2LTYuMzY1NzAxIDIuMDYwMDY2LTYuMzY1NzAxIDIuMjQ1NTY5LTYuMzY1NzAxQzIuMjY1MDk2LTYuMzY1NzAxIDIuNDUwNi02LjM2NTcwMSAyLjYxNjU3Ni02LjM0NjE3NEMyLjc5MjMxNy02LjMyNjY0NyAyLjg4MDE4Ny02LjMxNjg4NCAyLjg4MDE4Ny02LjE4OTk2MUMyLjg4MDE4Ny02LjE1MDkwNyAyLjg3MDQyMy02LjEyMTYxNyAyLjg0MTEzMy02LjAwNDQ1N0wxLjUzMjg0NS0uNzYxNTQxQzEuNDM1MjEyLS4zODA3NyAxLjQxNTY4NS0uMzAyNjY0IC42NDQzODEtLjMwMjY2NEMuNDc4NDA0LS4zMDI2NjQgLjM4MDc3LS4zMDI2NjQgLjM4MDc3LS4xMDczOTdDLjM4MDc3IDAgLjQ2ODY0MSAwIC42NDQzODEgMEg1LjE2NDgwOUM1LjM5OTEzIDAgNS40MDg4OTMgMCA1LjQ2NzQ3My0uMTY1OTc3TDYuMjM4Nzc3LTIuMjc0ODU5QzYuMjc3ODMxLTIuMzgyMjU2IDYuMjc3ODMxLTIuNDAxNzgzIDYuMjc3ODMxLTIuNDExNTQ2QzYuMjc3ODMxLTIuNDUwNiA2LjI0ODU0MS0yLjUxODk0MyA2LjE2MDY3MS0yLjUxODk0M1M2LjA2MzAzNy0yLjQ3MDEyNiA1Ljk5NDY5NC0yLjMxMzkxM0M1LjY2Mjc0LTEuNDE1Njg1IDUuMjMzMTUzLS4zMDI2NjQgMy41NDQwOTQtLjMwMjY2NEgyLjYyNjM0QzIuNDg5NjUzLS4zMDI2NjQgMi40NzAxMjYtLjMwMjY2NCAyLjQxMTU0Ni0uMzEyNDI3QzIuMzEzOTEzLS4zMjIxOSAyLjI4NDYyMy0uMzMxOTU0IDIuMjg0NjIzLS40MTAwNkMyLjI4NDYyMy0uNDM5MzUxIDIuMjg0NjIzLS40NTg4NzcgMi4zMzM0MzktLjYzNDYxN0wzLjY1MTQ5MS01LjkwNjgyNFonLz4KPHBhdGggaWQ9J2czLTEwNScgZD0nTTIuNzcyNzktNi4xMDIwOUMyLjc3Mjc5LTYuMjk3MzU3IDIuNjM2MTAzLTYuNDUzNTcxIDIuNDExNTQ2LTYuNDUzNTcxQzIuMTQ3OTM2LTYuNDUzNTcxIDEuODg0MzI2LTYuMTk5NzI0IDEuODg0MzI2LTUuOTM2MTE0QzEuODg0MzI2LTUuNzUwNjEgMi4wMjEwMTItNS41ODQ2MzMgMi4yNTUzMzMtNS41ODQ2MzNDMi40Nzk4OS01LjU4NDYzMyAyLjc3Mjc5LTUuODA5MTkgMi43NzI3OS02LjEwMjA5Wk0yLjAzMDc3Ni0yLjQzMTA3M0MyLjE0NzkzNi0yLjcxNDIxIDIuMTQ3OTM2LTIuNzMzNzM3IDIuMjQ1NTY5LTIuOTk3MzQ3QzIuMzIzNjc2LTMuMTkyNjE0IDIuMzcyNDkzLTMuMzI5MzAxIDIuMzcyNDkzLTMuNTE0ODA0QzIuMzcyNDkzLTMuOTU0MTU1IDIuMDYwMDY2LTQuMzE1Mzk4IDEuNTcxODk5LTQuMzE1Mzk4Qy42NTQxNDQtNC4zMTUzOTggLjI4MzEzNy0yLjg5OTcxMyAuMjgzMTM3LTIuODExODQzQy4yODMxMzctMi43MTQyMSAuMzgwNzctMi43MTQyMSAuNDAwMjk3LTIuNzE0MjFDLjQ5NzkzMS0yLjcxNDIxIC41MDc2OTQtMi43MzM3MzcgLjU1NjUxMS0yLjg4OTk1Qy44MjAxMjEtMy44MDc3MDQgMS4yMTA2NTUtNC4xMDA2MDUgMS41NDI2MDgtNC4xMDA2MDVDMS42MjA3MTUtNC4xMDA2MDUgMS43ODY2OTItNC4xMDA2MDUgMS43ODY2OTItMy43ODgxNzhDMS43ODY2OTItMy41ODMxNDggMS43MTgzNDktMy4zNzgxMTcgMS42NzkyOTUtMy4yODA0ODRDMS42MDExODktMy4wMjY2MzcgMS4xNjE4MzgtMS44OTQwODkgMS4wMDU2MjUtMS40NzQyNjVDLjkwNzk5MS0xLjIyMDQxOCAuNzgxMDY4LS44OTgyMjggLjc4MTA2OC0uNjkzMTk3Qy43ODEwNjgtLjIzNDMyIDEuMTEzMDIxIC4xMDczOTcgMS41ODE2NjIgLjEwNzM5N0MyLjQ5OTQxNiAuMTA3Mzk3IDIuODYwNjYtMS4zMDgyODggMi44NjA2Ni0xLjM5NjE1OEMyLjg2MDY2LTEuNDkzNzkyIDIuNzcyNzktMS40OTM3OTIgMi43NDM1LTEuNDkzNzkyQzIuNjQ1ODY2LTEuNDkzNzkyIDIuNjQ1ODY2LTEuNDY0NTAyIDIuNTk3MDUtMS4zMTgwNTJDMi40MjEzMDktLjcwMjk2MSAyLjA5OTExOS0uMTA3Mzk3IDEuNjAxMTg5LS4xMDczOTdDMS40MzUyMTItLjEwNzM5NyAxLjM2Njg2OC0uMjA1MDMgMS4zNjY4NjgtLjQyOTU4N0MxLjM2Njg2OC0uNjczNjcxIDEuNDI1NDQ4LS44MTAzNTggMS42NTAwMDUtMS40MDU5MjJMMi4wMzA3NzYtMi40MzEwNzNaJy8+CjxwYXRoIGlkPSdnNS00MycgZD0nTTMuOTkzMjA4LTIuMjQ1NTY5SDYuNzE3MTgxQzYuODUzODY4LTIuMjQ1NTY5IDcuMDM5MzcyLTIuMjQ1NTY5IDcuMDM5MzcyLTIuNDQwODM2UzYuODUzODY4LTIuNjM2MTAzIDYuNzE3MTgxLTIuNjM2MTAzSDMuOTkzMjA4Vi01LjM2OTg0QzMuOTkzMjA4LTUuNTA2NTI2IDMuOTkzMjA4LTUuNjkyMDMgMy43OTc5NDEtNS42OTIwM1MzLjYwMjY3NC01LjUwNjUyNiAzLjYwMjY3NC01LjM2OTg0Vi0yLjYzNjEwM0guODY4OTM4Qy43MzIyNTEtMi42MzYxMDMgLjU0Njc0Ny0yLjYzNjEwMyAuNTQ2NzQ3LTIuNDQwODM2Uy43MzIyNTEtMi4yNDU1NjkgLjg2ODkzOC0yLjI0NTU2OUgzLjYwMjY3NFYuNDg4MTY3QzMuNjAyNjc0IC42MjQ4NTQgMy42MDI2NzQgLjgxMDM1OCAzLjc5Nzk0MSAuODEwMzU4UzMuOTkzMjA4IC42MjQ4NTQgMy45OTMyMDggLjQ4ODE2N1YtMi4yNDU1NjlaJy8+CjxwYXRoIGlkPSdnNS00OScgZD0nTTIuODcwNDIzLTYuMjQ4NTQxQzIuODcwNDIzLTYuNDgyODYxIDIuODcwNDIzLTYuNTAyMzg4IDIuNjQ1ODY2LTYuNTAyMzg4QzIuMDQwNTM5LTUuODc3NTM0IDEuMTgxMzY1LTUuODc3NTM0IC44Njg5MzgtNS44Nzc1MzRWLTUuNTc0ODdDMS4wNjQyMDUtNS41NzQ4NyAxLjY0MDI0Mi01LjU3NDg3IDIuMTQ3OTM2LTUuODI4NzE3Vi0uNzcxMzA0QzIuMTQ3OTM2LS40MTk4MjQgMi4xMTg2NDYtLjMwMjY2NCAxLjIzOTk0NS0uMzAyNjY0SC45Mjc1MThWMEMxLjI2OTIzNS0uMDI5MjkgMi4xMTg2NDYtLjAyOTI5IDIuNTA5MTgtLjAyOTI5UzMuNzQ5MTI0LS4wMjkyOSA0LjA5MDg0MSAwVi0uMzAyNjY0SDMuNzc4NDE0QzIuODk5NzEzLS4zMDI2NjQgMi44NzA0MjMtLjQxMDA2IDIuODcwNDIzLS43NzEzMDRWLTYuMjQ4NTQxWicvPgo8cGF0aCBpZD0nZzUtNTAnIGQ9J00xLjIzOTk0NS0uNzUxNzc4TDIuMjc0ODU5LTEuNzU3NDAyQzMuNzk3OTQxLTMuMTA0NzQ0IDQuMzgzNzQyLTMuNjMxOTY0IDQuMzgzNzQyLTQuNjA4Mjk5QzQuMzgzNzQyLTUuNzIxMzIgMy41MDUwNDEtNi41MDIzODggMi4zMTM5MTMtNi41MDIzODhDMS4yMTA2NTUtNi41MDIzODggLjQ4ODE2Ny01LjYwNDE2IC40ODgxNjctNC43MzUyMjJDLjQ4ODE2Ny00LjE4ODQ3NSAuOTc2MzM0LTQuMTg4NDc1IDEuMDA1NjI1LTQuMTg4NDc1QzEuMTcxNjAxLTQuMTg4NDc1IDEuNTEzMzE4LTQuMzA1NjM1IDEuNTEzMzE4LTQuNzA1OTMyQzEuNTEzMzE4LTQuOTU5Nzc5IDEuMzM3NTc4LTUuMjEzNjI2IC45OTU4NjEtNS4yMTM2MjZDLjkxNzc1NC01LjIxMzYyNiAuODk4MjI4LTUuMjEzNjI2IC44Njg5MzgtNS4yMDM4NjNDMS4wOTM0OTUtNS44Mzg0OCAxLjYyMDcxNS02LjE5OTcyNCAyLjE4Njk4OS02LjE5OTcyNEMzLjA3NTQ1NC02LjE5OTcyNCAzLjQ5NTI3Ny01LjQwODg5MyAzLjQ5NTI3Ny00LjYwODI5OUMzLjQ5NTI3Ny0zLjgyNzIzMSAzLjAwNzExLTMuMDU1OTI3IDIuNDcwMTI2LTIuNDUwNkwuNTk1NTY0LS4zNjEyNDRDLjQ4ODE2Ny0uMjUzODQ3IC40ODgxNjctLjIzNDMyIC40ODgxNjcgMEg0LjExMDM2OEw0LjM4Mzc0Mi0xLjY5ODgyMkg0LjEzOTY1OEM0LjA5MDg0MS0xLjQwNTkyMiA0LjAyMjQ5OC0uOTc2MzM0IDMuOTI0ODY1LS44Mjk4ODRDMy44NTY1MjEtLjc1MTc3OCAzLjIxMjE0LS43NTE3NzggMi45OTczNDctLjc1MTc3OEgxLjIzOTk0NVonLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzEuNzY1MjMxJyB5PSctMTYuOTMxMDkyJyB4bGluazpocmVmPScjZzYtMTI2Jy8+Cjx1c2UgeD0nMCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c0LTMwJy8+Cjx1c2UgeD0nOC4wODI3ODYnIHk9Jy0xOS4wMDkzNzMnIHhsaW5rOmhyZWY9JyNnMy03NicvPgo8dXNlIHg9JzguMDgyNzg2JyB5PSctOS40NTUzMTEnIHhsaW5rOmhyZWY9JyNnMy0xMDUnLz4KPHVzZSB4PScxMS40NDYzODQnIHk9Jy05LjQ1NTMxMScgeGxpbms6aHJlZj0nI2c1LTQzJy8+Cjx1c2UgeD0nMTkuMDQwMTI0JyB5PSctOS40NTUzMTEnIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzIzLjkyMTgxNScgeT0nLTkuNDU1MzExJyB4bGluazpocmVmPScjZzMtNjEnLz4KPHVzZSB4PScyOC44MDM1MDYnIHk9Jy05LjQ1NTMxMScgeGxpbms6aHJlZj0nI2c1LTUwJy8+Cjx1c2UgeD0nMzguMDU3NjE3JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzYtNjEnLz4KPHVzZSB4PSc1Mi41NTQwMzYnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNC0zMCcvPgo8dXNlIHg9JzYwLjYzNjgyMicgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2czLTEwNScvPgo8dXNlIHg9JzgwLjA3MzQyNicgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQzJy8+Cjx1c2UgeD0nOTQuOTkwNDk0JyB5PSctMjIuNjg2MTk4JyB4bGluazpocmVmPScjZzYtNDknLz4KPHJlY3QgeD0nOTQuOTkwNDk0JyB5PSctMTcuMDE2MzU4JyBoZWlnaHQ9Jy41NTc4OScgd2lkdGg9JzYuODI4NDg5Jy8+Cjx1c2UgeD0nOTQuOTkwNDk0JyB5PSctMy42ODMwNTcnIHhsaW5rOmhyZWY9JyNnNi01MicvPgo8dXNlIHg9JzEwNS4zMzkwOTInIHk9Jy0zMi45MTY5MDYnIHhsaW5rOmhyZWY9JyNnMC0yMCcvPgo8dXNlIHg9JzExMi43MDA0MDMnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzExOC4wMTE0NScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+Cjx1c2UgeD0nMTI3LjkzOTQnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMi0wJy8+Cjx1c2UgeD0nMTQxLjg4NzEwNycgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c0LTIwJy8+Cjx1c2UgeD0nMTQ5Ljc0ODc1NCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMTU3LjM4NDM4NicgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTgnLz4KPHVzZSB4PScxNjkuNTcyMzU0JyB5PSctMzIuOTE2OTA2JyB4bGluazpocmVmPScjZzAtMTgnLz4KPHVzZSB4PScxODQuMjY5MycgeT0nLTIyLjY4NjE5OCcgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+CjxyZWN0IHg9JzE4MS4wMzQ5NjknIHk9Jy0xNy4wMTYzNTgnIGhlaWdodD0nLjU1Nzg5JyB3aWR0aD0nMTMuMjk3MTUxJy8+Cjx1c2UgeD0nMTgxLjAzNDk2OScgeT0nLTMuNjgzMDU3JyB4bGluazpocmVmPScjZzQtMTE0Jy8+Cjx1c2UgeD0nMTg3LjE4OTQ5NCcgeT0nLTEuNTkwOTEyJyB4bGluazpocmVmPScjZzMtNzYnLz4KPHVzZSB4PScxOTUuNTI3NjM0JyB5PSctMzIuOTE2OTA2JyB4bGluazpocmVmPScjZzAtMTknLz4KPHVzZSB4PScyMDguMTE5MzMxJyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScyMTMuNDMwMzc4JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzQtMzAnLz4KPHVzZSB4PScyMjEuNTEzMTYzJyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzMtMTA1Jy8+Cjx1c2UgeD0nMjI4LjQ3NDM0OCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PScyNDIuNDIyMDU2JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzQtMzAnLz4KPHVzZSB4PScyNTAuNTA0ODQyJyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzMtMTA1Jy8+Cjx1c2UgeD0nMjUzLjg2ODQ0JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzI2MS40NjIxOCcgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2c1LTQ5Jy8+Cjx1c2UgeD0nMjY2Ljg0MTk4NCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMjc1LjI1MjQ1NCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQzJy8+Cjx1c2UgeD0nMjg4Ljk3NDAwOScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMjk0LjI4NTA1NScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQ5Jy8+Cjx1c2UgeD0nMzA0LjIxMzAwNScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQzJy8+Cjx1c2UgeD0nMzE3LjkzNDU1OScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c0LTIwJy8+Cjx1c2UgeD0nMzI1Ljc5NjIwNycgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzMzLjQzMTg0OScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTgnLz4KPHVzZSB4PSczNDUuNjE5ODE3JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PSczNTAuOTMwODY0JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzQtMTE0Jy8+Cjx1c2UgeD0nMzU3LjA4NTM4OScgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2czLTc2Jy8+Cjx1c2UgeD0nMzY0LjIyODAyMycgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMzcxLjg2MzY1OCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQwJy8+Cjx1c2UgeD0nMzc3LjE3NDcwNCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c0LTMwJy8+Cjx1c2UgeD0nMzg1LjI1NzQ5JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzMtMTA1Jy8+Cjx1c2UgeD0nMzg4LjYyMTA4OScgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2c1LTQzJy8+Cjx1c2UgeD0nMzk2LjIxNDgyOCcgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2c1LTQ5Jy8+Cjx1c2UgeD0nNDA0LjY5NDA5NCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2cyLTAnLz4KPHVzZSB4PSc0MTguNjQxODAxJyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzQtMzAnLz4KPHVzZSB4PSc0MjYuNzI0NTg3JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzMtMTA1Jy8+Cjx1c2UgeD0nNDMwLjU4NjMxMScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nNDM1Ljg5NzMyJyB5PSctMzIuOTE2OTA2JyB4bGluazpocmVmPScjZzAtMjEnLz4KPHVzZSB4PSc0NDUuNTgzMjI3JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzQtNTknLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
(3.813)![\tilde{\phi}_{i+1/2}^R = \phi_{i+1} - {1 \over 4} \left[
\left( 1 + \kappa \right) \Phi \left( r_R \right)
\left( \phi_{i+1} - \phi_{i} \right)
+ \left( 1 - \kappa \right) \Phi \left( {1 \over {r_R}} \right)
\left( \phi_{i+2} - \phi_{i+1} \right) \right] ,](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzQ2My43NjY2MjJwdCcgaGVpZ2h0PSczMy40NzQ4MTFwdCcgdmlld0JveD0nMCAtMzMuNDc0OCA0NjMuNzY2NjIyIDMzLjQ3NDgxMSc+CjxkZWZzPgo8cGF0aCBpZD0nZzAtMTgnIGQ9J005Ljc2MzM4NyAzMi43NjMxMzhDOS43NjMzODcgMzIuNzA3MzQ3IDkuNzM1NDkyIDMyLjY3OTQ1MiA5LjcwNzU5NyAzMi42Mzc2MDlDOS4xOTE1MzIgMzIuMTIxNTQ0IDguMjU3MDM2IDMxLjE4NzA0OSA3LjMyMjU0IDI5LjY4MDY5N0M1LjA3Njk2MSAyNi4wODIxOTIgNC4wNTg3OCAyMS41NDkxOTEgNC4wNTg3OCAxNi4xNzkzMjhDNC4wNTg3OCAxMi40MjczOTcgNC41NjA4OTcgNy41ODc1NDcgNi44NjIyNjcgMy40MzExMzNDNy45NjQxMzQgMS40NTA1NiA5LjEwNzg0NiAuMzA2ODQ5IDkuNzIxNTQ0LS4zMDY4NDlDOS43NjMzODctLjM0ODY5MiA5Ljc2MzM4Ny0uMzc2NTg4IDkuNzYzMzg3LS40MTg0MzFDOS43NjMzODctLjU1NzkwOCA5LjY2NTc1My0uNTU3OTA4IDkuNDcwNDg2LS41NTc5MDhTOS4yNDczMjMtLjU1NzkwOCA5LjAzODEwNy0uMzQ4NjkyQzQuMzY1NjI5IDMuOTA1MzU1IDIuOTAxMTIxIDEwLjI5MzQgMi45MDExMjEgMTYuMTY1MzhDMi45MDExMjEgMjEuNjQ2ODI0IDQuMTU2NDEzIDI3LjE3MDExMiA3LjY5OTEyOCAzMS4zNDA0NzNDNy45NzgwODIgMzEuNjYxMjcgOC41MDgwOTUgMzIuMjMzMTI2IDkuMDc5OTUgMzIuNzM1MjQzQzkuMjQ3MzIzIDMyLjkwMjYxNSA5LjI3NTIxOCAzMi45MDI2MTUgOS40NzA0ODYgMzIuOTAyNjE1UzkuNzYzMzg3IDMyLjkwMjYxNSA5Ljc2MzM4NyAzMi43NjMxMzhaJy8+CjxwYXRoIGlkPSdnMC0xOScgZD0nTTcuMzUwNDM2IDE2LjE3OTMyOEM3LjM1MDQzNiAxMC42OTc4ODMgNi4wOTUxNDMgNS4xNzQ1OTUgMi41NTI0MjggMS4wMDQyMzRDMi4yNzM0NzQgLjY4MzQzNyAxLjc0MzQ2MiAuMTExNTgyIDEuMTcxNjA2LS4zOTA1MzVDMS4wMDQyMzQtLjU1NzkwOCAuOTc2MzM5LS41NTc5MDggLjc4MTA3MS0uNTU3OTA4Qy42MTM2OTktLjU1NzkwOCAuNDg4MTY5LS41NTc5MDggLjQ4ODE2OS0uNDE4NDMxQy40ODgxNjktLjM2MjY0IC41NDM5Ni0uMzA2ODQ5IC41NzE4NTYtLjI3ODk1NEMxLjA2MDAyNSAuMjIzMTYzIDEuOTk0NTIxIDEuMTU3NjU5IDIuOTI5MDE2IDIuNjY0MDFDNS4xNzQ1OTUgNi4yNjI1MTYgNi4xOTI3NzcgMTAuNzk1NTE3IDYuMTkyNzc3IDE2LjE2NTM4QzYuMTkyNzc3IDE5LjkxNzMxIDUuNjkwNjYgMjQuNzU3MTYxIDMuMzg5MjkgMjguOTEzNTc0QzIuMjg3NDIyIDMwLjg5NDE0NyAxLjEyOTc2MyAzMi4wNTE4MDYgLjU0Mzk2IDMyLjYzNzYwOUMuNTE2MDY1IDMyLjY3OTQ1MiAuNDg4MTY5IDMyLjcyMTI5NSAuNDg4MTY5IDMyLjc2MzEzOEMuNDg4MTY5IDMyLjkwMjYxNSAuNjEzNjk5IDMyLjkwMjYxNSAuNzgxMDcxIDMyLjkwMjYxNUMuOTc2MzM5IDMyLjkwMjYxNSAxLjAwNDIzNCAzMi45MDI2MTUgMS4yMTM0NSAzMi42OTM0QzUuODg1OTI4IDI4LjQzOTM1MiA3LjM1MDQzNiAyMi4wNTEzMDggNy4zNTA0MzYgMTYuMTc5MzI4WicvPgo8cGF0aCBpZD0nZzAtMjAnIGQ9J00zLjQ4NjkyNCAzMi45MDI2MTVINy4xNTUxNjhWMzIuMTM1NDkySDQuMjU0MDQ3Vi4yMDkyMTVINy4xNTUxNjhWLS41NTc5MDhIMy40ODY5MjRWMzIuOTAyNjE1WicvPgo8cGF0aCBpZD0nZzAtMjEnIGQ9J00zLjA5NjM4OSAzMi4xMzU0OTJILjE5NTI2OFYzMi45MDI2MTVIMy44NjM1MTJWLS41NTc5MDhILjE5NTI2OFYuMjA5MjE1SDMuMDk2Mzg5VjMyLjEzNTQ5MlonLz4KPHBhdGggaWQ9J2czLTIwJyBkPSdNMi45NzA4NTktMy40ODY5MjRDMy40MzExMzMtMy43Mzc5ODMgMy45NDcxOTgtNC4xNzAzNjEgNC4yOTU4OS00LjQ2MzI2M0M1LjEzMjc1Mi01LjE4ODU0MyA1LjQzOTYwMS01LjQxMTcwNiA1Ljk2OTYxNC01LjYyMDkyMkM1LjkxMzgyMy01LjUzNzIzNSA1Ljg5OTg3NS01LjQyNTY1NCA1Ljg5OTg3NS01LjMyODAyQzUuODk5ODc1LTQuOTUxNDMyIDYuMjIwNjcyLTQuODgxNjk0IDYuMzYwMTQ5LTQuODgxNjk0QzYuODA2NDc2LTQuODgxNjk0IDcuMDU3NTM0LTUuMzAwMTI1IDcuMDU3NTM0LTUuNTY1MTMxQzcuMDU3NTM0LTUuNjQ4ODE3IDcuMDI5NjM5LTYuMDExNDU3IDYuNTQxNDY5LTYuMDExNDU3QzUuNzA0NjA4LTYuMDExNDU3IDQuODgxNjk0LTUuMzAwMTI1IDQuMjY3OTk1LTQuNzg0MDZDMy40NTkwMjktNC4wNzI3MjcgMy4wNTQ1NDUtMy43NjU4NzggMi40ODI2OS0zLjU4NDU1OEwzLjAxMjcwMi01LjgwMjI0MkMzLjAxMjcwMi02LjAyNTQwNSAyLjgzMTM4Mi02LjE1MDkzNCAyLjY1MDA2Mi02LjE1MDkzNEMyLjUyNDUzMy02LjE1MDkzNCAyLjIxNzY4NC02LjEwOTA5MSAyLjEwNjEwMi01LjY2Mjc2NUwuODA4OTY2LS40ODgxNjlDLjc2NzEyMy0uMzIwNzk3IC43NjcxMjMtLjI5MjkwMiAuNzY3MTIzLS4yMDkyMTVDLjc2NzEyMy0uMDEzOTQ4IC45MjA1NDggLjEzOTQ3NyAxLjEyOTc2MyAuMTM5NDc3QzEuNTQ4MTk0IC4xMzk0NzcgMS42MzE4OC0uMjIzMTYzIDEuNzAxNjE5LS41MTYwNjVDMS43ODUzMDUtLjgwODk2NiAyLjM1NzE2MS0zLjEzODIzMiAyLjM4NTA1Ni0zLjIyMTkxOEM0LjE1NjQxMy0zLjEzODIzMiA0Ljc1NjE2NC0yLjY5MTkwNSA0Ljc1NjE2NC0yLjAwODQ2OEM0Ljc1NjE2NC0xLjkxMDgzNCA0Ljc1NjE2NC0xLjg2ODk5MSA0LjcxNDMyMS0xLjcxNTU2N0M0LjY1ODUzMS0xLjQ1MDU2IDQuNjU4NTMxLTEuMjk3MTM2IDQuNjU4NTMxLTEuMjEzNDVDNC42NTg1MzEtLjM3NjU4OCA1LjIwMjQ5MSAuMTM5NDc3IDUuODg1OTI4IC4xMzk0NzdDNi40NTc3ODMgLjEzOTQ3NyA2Ljc3ODU4LS4yNjUwMDYgNi45ODc3OTYtLjYyNzY0NkM3LjI4MDY5Ny0xLjE3MTYwNiA3LjQ2MjAxNy0xLjkzODczIDcuNDYyMDE3LTEuOTk0NTIxQzcuNDYyMDE3LTIuMDY0MjU5IDcuNDA2MjI3LTIuMTIwMDUgNy4zMjI1NC0yLjEyMDA1QzcuMTk3MDExLTIuMTIwMDUgNy4xODMwNjQtMi4wNjQyNTkgNy4xMjcyNzMtMS44NDEwOTZDNi45NDU5NTMtMS4xNzE2MDYgNi42MzkxMDMtLjEzOTQ3NyA1LjkyNzc3MS0uMTM5NDc3QzUuNjIwOTIyLS4xMzk0NzcgNS40Njc0OTctLjMyMDc5NyA1LjQ2NzQ5Ny0uODA4OTY2QzUuNDY3NDk3LTEuMDczOTczIDUuNTIzMjg4LTEuMzgwODIyIDUuNTc5MDc4LTEuNTkwMDM3QzUuNjA2OTc0LTEuNzI5NTE0IDUuNjQ4ODE3LTEuODk2ODg3IDUuNjQ4ODE3LTIuMDUwMzExQzUuNjQ4ODE3LTMuMzE5NTUyIDMuODkxNDA3LTMuNDQ1MDgxIDIuOTcwODU5LTMuNDg2OTI0WicvPgo8cGF0aCBpZD0nZzMtMzAnIGQ9J001Ljk5NzUwOS05LjU1NDE3MkM1Ljk5NzUwOS05LjY3OTcwMSA1Ljg5OTg3NS05LjY3OTcwMSA1Ljg1ODAzMi05LjY3OTcwMUM1LjczMjUwMy05LjY3OTcwMSA1LjcxODU1NS05LjY1MTgwNiA1LjY2Mjc2NS05LjQxNDY5NUw0LjkwOTU4OS02LjQxNTk0QzQuODY3NzQ2LTYuMjM0NjIgNC44NTM3OTgtNi4yMjA2NzIgNC44Mzk4NTEtNi4yMDY3MjVDNC44MjU5MDMtNi4xNzg4MjkgNC43MjgyNjktNi4xNjQ4ODIgNC43MDAzNzQtNi4xNjQ4ODJDMi40MTI5NTEtNS45Njk2MTQgLjY1NTU0Mi00LjA4NjY3NSAuNjU1NTQyLTIuMzQzMjEzQy42NTU1NDItLjgzNjg2MiAxLjgxMzIgLjA4MzY4NiAzLjI2Mzc2MSAuMTY3MzcyQzMuMTUyMTc5IC41OTk3NTEgMy4wNTQ1NDUgMS4wNDYwNzcgMi45NDI5NjQgMS40Nzg0NTZDMi43NDc2OTYgMi4yMTc2ODQgMi42MzYxMTUgMi42Nzc5NTggMi42MzYxMTUgMi43MzM3NDhDMi42MzYxMTUgMi43NjE2NDQgMi42MzYxMTUgMi44NDUzMyAyLjc3NTU5MiAyLjg0NTMzQzIuODE3NDM1IDIuODQ1MzMgMi44NzMyMjUgMi44NDUzMyAyLjkwMTEyMSAyLjc4OTUzOUMyLjkyOTAxNiAyLjc2MTY0NCAzLjAxMjcwMiAyLjQyNjg5OSAzLjA2ODQ5MyAyLjI0NTU3OUwzLjU4NDU1OCAuMTY3MzcyQzUuOTY5NjE0IC4wNDE4NDMgNy43ODI4MTQtMS45MTA4MzQgNy43ODI4MTQtMy42NjgyNDRDNy43ODI4MTQtNS4wNzY5NjEgNi43MjI3OS02LjA4MTE5NiA1LjE3NDU5NS02LjE3ODgyOUw1Ljk5NzUwOS05LjU1NDE3MlpNNS4wOTA5MDktNS44OTk4NzVDNi4wMTE0NTctNS44NDQwODUgNi45MzIwMDUtNS4zMjgwMiA2LjkzMjAwNS0zLjk2MTE0NkM2LjkzMjAwNS0yLjM4NTA1NiA1LjgzMDEzNy0uMjkyOTAyIDMuNjU0Mjk2LS4xMjU1MjlMNS4wOTA5MDktNS44OTk4NzVaTTMuMzMzNDk5LS4xMTE1ODJDMi42NTAwNjItLjE1MzQyNSAxLjUwNjM1MS0uNTE2MDY1IDEuNTA2MzUxLTIuMDUwMzExQzEuNTA2MzUxLTMuODA3NzIxIDIuNzc1NTkyLTUuNzYwMzk5IDQuNzg0MDYtNS44ODU5MjhMMy4zMzM0OTktLjExMTU4MlonLz4KPHBhdGggaWQ9J2czLTU5JyBkPSdNMi43MTk4MDEgLjA1NTc5MUMyLjcxOTgwMS0uNzUzMTc2IDIuNDU0Nzk1LTEuMzUyOTI3IDEuODgyOTM5LTEuMzUyOTI3QzEuNDM2NjEzLTEuMzUyOTI3IDEuMjEzNDUtLjk5MDI4NiAxLjIxMzQ1LS42ODM0MzdTMS40MjI2NjUgMCAxLjg5Njg4NyAwQzIuMDc4MjA3IDAgMi4yMzE2MzEtLjA1NTc5MSAyLjM1NzE2MS0uMTgxMzJDMi4zODUwNTYtLjIwOTIxNSAyLjM5OTAwNC0uMjA5MjE1IDIuNDEyOTUxLS4yMDkyMTVDMi40NDA4NDctLjIwOTIxNSAyLjQ0MDg0Ny0uMDEzOTQ4IDIuNDQwODQ3IC4wNTU3OTFDMi40NDA4NDcgLjUxNjA2NSAyLjM1NzE2MSAxLjQyMjY2NSAxLjU0ODE5NCAyLjMyOTI2NUMxLjM5NDc3IDIuNDk2NjM4IDEuMzk0NzcgMi41MjQ1MzMgMS4zOTQ3NyAyLjU1MjQyOEMxLjM5NDc3IDIuNjIyMTY3IDEuNDY0NTA4IDIuNjkxOTA1IDEuNTM0MjQ3IDIuNjkxOTA1QzEuNjQ1ODI4IDIuNjkxOTA1IDIuNzE5ODAxIDEuNjU5Nzc2IDIuNzE5ODAxIC4wNTU3OTFaJy8+CjxwYXRoIGlkPSdnMy0xMTQnIGQ9J001LjQyNTY1NC01LjcwNDYwOEM0Ljk5MzI3NS01LjYyMDkyMiA0Ljc3MDExMi01LjMxNDA3MiA0Ljc3MDExMi01LjAwNzIyM0M0Ljc3MDExMi00LjY3MjQ3OCA1LjAzNTExOC00LjU2MDg5NyA1LjIzMDM4Ni00LjU2MDg5N0M1LjYyMDkyMi00LjU2MDg5NyA1Ljk0MTcxOS00Ljg5NTY0MSA1Ljk0MTcxOS01LjMxNDA3MkM1Ljk0MTcxOS01Ljc2MDM5OSA1LjUwOTM0LTYuMTUwOTM0IDQuODExOTU1LTYuMTUwOTM0QzQuMjU0MDQ3LTYuMTUwOTM0IDMuNjEyNDUzLTUuODk5ODc1IDMuMDI2NjUtNS4wNDkwNjZDMi45MjkwMTYtNS43ODgyOTQgMi4zNzExMDgtNi4xNTA5MzQgMS44MTMyLTYuMTUwOTM0QzEuMjY5MjQtNi4xNTA5MzQgLjk5MDI4Ni01LjczMjUwMyAuODIyOTE0LTUuNDI1NjU0Qy41ODU4MDMtNC45MjM1MzcgLjM3NjU4OC00LjA4NjY3NSAuMzc2NTg4LTQuMDE2OTM2Qy4zNzY1ODgtMy45NjExNDYgLjQzMjM3OS0zLjg5MTQwNyAuNTMwMDEyLTMuODkxNDA3Qy42NDE1OTQtMy44OTE0MDcgLjY1NTU0Mi0zLjkwNTM1NSAuNzM5MjI4LTQuMjI2MTUyQy45NDg0NDMtNS4wNjMwMTQgMS4yMTM0NS01Ljg3MTk4IDEuNzcxMzU3LTUuODcxOThDMi4xMDYxMDItNS44NzE5OCAyLjIwMzczNi01LjYzNDg2OSAyLjIwMzczNi01LjIzMDM4NkMyLjIwMzczNi00LjkyMzUzNyAyLjA2NDI1OS00LjM3OTU3NyAxLjk2NjYyNS0zLjk0NzE5OEwxLjU3NjA5LTIuNDQwODQ3QzEuNTIwMjk5LTIuMTc1ODQxIDEuMzY2ODc0LTEuNTQ4MTk0IDEuMjk3MTM2LTEuMjk3MTM2QzEuMTk5NTAyLS45MzQ0OTYgMS4wNDYwNzctLjI3ODk1NCAxLjA0NjA3Ny0uMjA5MjE1QzEuMDQ2MDc3LS4wMTM5NDggMS4xOTk1MDIgLjEzOTQ3NyAxLjQwODcxNyAuMTM5NDc3QzEuNTYyMTQyIC4xMzk0NzcgMS44MjcxNDggLjA0MTg0MyAxLjkxMDgzNC0uMjM3MTExQzEuOTUyNjc3LS4zNDg2OTIgMi40Njg3NDItMi40NTQ3OTUgMi41NTI0MjgtMi43NzU1OTJDMi42MjIxNjctMy4wODI0NDEgMi43MDU4NTMtMy4zNzUzNDIgMi43NzU1OTItMy42ODIxOTJDMi44MzEzODItMy44Nzc0NiAyLjg4NzE3My00LjEwMDYyMyAyLjkyOTAxNi00LjI4MTk0M0MyLjk3MDg1OS00LjQwNzQ3MiAzLjM0NzQ0Ny01LjA5MDkwOSAzLjY5NjEzOS01LjM5Nzc1OEMzLjg2MzUxMi01LjU1MTE4MyA0LjIyNjE1Mi01Ljg3MTk4IDQuNzk4MDA3LTUuODcxOThDNS4wMjExNzEtNS44NzE5OCA1LjI0NDMzNC01LjgzMDEzNyA1LjQyNTY1NC01LjcwNDYwOFonLz4KPHBhdGggaWQ9J2c1LTgnIGQ9J001LjQyNTY1NC0xLjg0MTA5NkM3LjU0NTcwNC0yLjAyMjQxNiA5LjA5Mzg5OC0zLjMxOTU1MiA5LjA5Mzg5OC00Ljc1NjE2NEM5LjA5Mzg5OC02LjI0ODU2OCA3LjUwMzg2MS03LjUwMzg2MSA1LjQyNTY1NC03LjY4NTE4MVYtOC40NTIzMDRDNS40MjU2NTQtOC45NTQ0MjEgNS40NTM1NDktOS4xMjE3OTMgNi42NjY5OTktOS4xMjE3OTNINy4wODU0M1YtOS41MjYyNzZDNi43MDg4NDItOS40OTgzODEgNS4zNTU5MTUtOS40OTgzODEgNC44OTU2NDEtOS40OTgzODFTMy4wODI0NDEtOS40OTgzODEgMi43MDU4NTMtOS41MjYyNzZWLTkuMTIxNzkzSDMuMTI0Mjg0QzQuMzM3NzMzLTkuMTIxNzkzIDQuMzY1NjI5LTguOTU0NDIxIDQuMzY1NjI5LTguNDUyMzA0Vi03LjY3MTIzM0MyLjIwMzczNi03LjQ3NTk2NSAuNzUzMTc2LTYuMTUwOTM0IC43NTMxNzYtNC43NzAxMTJDLjc1MzE3Ni0zLjMzMzQ5OSAyLjI0NTU3OS0yLjA1MDMxMSA0LjM2NTYyOS0xLjg1NTA0NFYtMS4wNzM5NzNDNC4zNjU2MjktLjU3MTg1NiA0LjMzNzczMy0uNDA0NDgzIDMuMTI0Mjg0LS40MDQ0ODNIMi43MDU4NTNWMEMzLjA4MjQ0MS0uMDI3ODk1IDQuNDM1MzY3LS4wMjc4OTUgNC44OTU2NDEtLjAyNzg5NVM2LjcwODg0Mi0uMDI3ODk1IDcuMDg1NDMgMFYtLjQwNDQ4M0g2LjY2Njk5OUM1LjQ1MzU0OS0uNDA0NDgzIDUuNDI1NjU0LS41NzE4NTYgNS40MjU2NTQtMS4wNzM5NzNWLTEuODQxMDk2Wk00LjM2NTYyOS0yLjE0Nzk0NUMyLjg0NTMzLTIuMzQzMjEzIDIuMDIyNDE2LTMuMjM1ODY2IDIuMDIyNDE2LTQuNzU2MTY0QzIuMDIyNDE2LTYuMjkwNDExIDIuODMxMzgyLTcuMTgzMDY0IDQuMzY1NjI5LTcuMzc4MzMxVi0yLjE0Nzk0NVpNNS40MjU2NTQtNy4zOTIyNzlDNy4wNTc1MzQtNy4xODMwNjQgNy44MjQ2NTgtNi4yNDg1NjggNy44MjQ2NTgtNC43NzAxMTJDNy44MjQ2NTgtMy4zMTk1NTIgNy4xMTMzMjUtMi4zNTcxNjEgNS40MjU2NTQtMi4xMzM5OThWLTcuMzkyMjc5WicvPgo8cGF0aCBpZD0nZzUtNDAnIGQ9J000LjUzMzAwMSAzLjM4OTI5QzQuNTMzMDAxIDMuMzQ3NDQ3IDQuNTMzMDAxIDMuMzE5NTUyIDQuMjk1ODkgMy4wODI0NDFDMi45MDExMjEgMS42NzM3MjQgMi4xMjAwNS0uNjI3NjQ2IDIuMTIwMDUtMy40NzI5NzZDMi4xMjAwNS02LjE3ODgyOSAyLjc3NTU5Mi04LjUwODA5NSA0LjM5MzUyNC0xMC4xNTM5MjNDNC41MzMwMDEtMTAuMjc5NDUyIDQuNTMzMDAxLTEwLjMwNzM0NyA0LjUzMzAwMS0xMC4zNDkxOTFDNC41MzMwMDEtMTAuNDMyODc3IDQuNDYzMjYzLTEwLjQ2MDc3MiA0LjQwNzQ3Mi0xMC40NjA3NzJDNC4yMjYxNTItMTAuNDYwNzcyIDMuMDgyNDQxLTkuNDU2NTM4IDIuMzk5MDA0LTguMDg5NjY0QzEuNjg3NjcxLTYuNjgwOTQ2IDEuMzY2ODc0LTUuMTg4NTQzIDEuMzY2ODc0LTMuNDcyOTc2QzEuMzY2ODc0LTIuMjMxNjMxIDEuNTYyMTQyLS41NzE4NTYgMi4yODc0MjIgLjkyMDU0OEMzLjExMDMzNiAyLjU5NDI3MSA0LjI1NDA0NyAzLjUwMDg3MiA0LjQwNzQ3MiAzLjUwMDg3MkM0LjQ2MzI2MyAzLjUwMDg3MiA0LjUzMzAwMSAzLjQ3Mjk3NiA0LjUzMzAwMSAzLjM4OTI5WicvPgo8cGF0aCBpZD0nZzUtNDEnIGQ9J00zLjkzMzI1LTMuNDcyOTc2QzMuOTMzMjUtNC41MzMwMDEgMy43OTM3NzMtNi4yNjI1MTYgMy4wMTI3MDItNy44ODA0NDhDMi4xODk3ODgtOS41NTQxNzIgMS4wNDYwNzctMTAuNDYwNzcyIC44OTI2NTMtMTAuNDYwNzcyQy44MzY4NjItMTAuNDYwNzcyIC43NjcxMjMtMTAuNDMyODc3IC43NjcxMjMtMTAuMzQ5MTkxQy43NjcxMjMtMTAuMzA3MzQ3IC43NjcxMjMtMTAuMjc5NDUyIDEuMDA0MjM0LTEwLjA0MjM0MUMyLjM5OTAwNC04LjYzMzYyNCAzLjE4MDA3NS02LjMzMjI1NCAzLjE4MDA3NS0zLjQ4NjkyNEMzLjE4MDA3NS0uNzgxMDcxIDIuNTI0NTMzIDEuNTQ4MTk0IC45MDY2IDMuMTk0MDIyQy43NjcxMjMgMy4zMTk1NTIgLjc2NzEyMyAzLjM0NzQ0NyAuNzY3MTIzIDMuMzg5MjlDLjc2NzEyMyAzLjQ3Mjk3NiAuODM2ODYyIDMuNTAwODcyIC44OTI2NTMgMy41MDA4NzJDMS4wNzM5NzMgMy41MDA4NzIgMi4yMTc2ODQgMi40OTY2MzggMi45MDExMjEgMS4xMjk3NjNDMy42MTI0NTMtLjI5MjkwMiAzLjkzMzI1LTEuNzk5MjUzIDMuOTMzMjUtMy40NzI5NzZaJy8+CjxwYXRoIGlkPSdnNS00MycgZD0nTTUuNTY1MTMxLTMuMjIxOTE4SDkuNDE0Njk1QzkuNjA5OTYzLTMuMjIxOTE4IDkuODYxMDIxLTMuMjIxOTE4IDkuODYxMDIxLTMuNDcyOTc2QzkuODYxMDIxLTMuNzM3OTgzIDkuNjIzOTEtMy43Mzc5ODMgOS40MTQ2OTUtMy43Mzc5ODNINS41NjUxMzFWLTcuNTg3NTQ3QzUuNTY1MTMxLTcuNzgyODE0IDUuNTY1MTMxLTguMDMzODczIDUuMzE0MDcyLTguMDMzODczQzUuMDQ5MDY2LTguMDMzODczIDUuMDQ5MDY2LTcuNzk2NzYyIDUuMDQ5MDY2LTcuNTg3NTQ3Vi0zLjczNzk4M0gxLjE5OTUwMkMxLjAwNDIzNC0zLjczNzk4MyAuNzUzMTc2LTMuNzM3OTgzIC43NTMxNzYtMy40ODY5MjRDLjc1MzE3Ni0zLjIyMTkxOCAuOTkwMjg2LTMuMjIxOTE4IDEuMTk5NTAyLTMuMjIxOTE4SDUuMDQ5MDY2Vi42Mjc2NDZDNS4wNDkwNjYgLjgyMjkxNCA1LjA0OTA2NiAxLjA3Mzk3MyA1LjMwMDEyNSAxLjA3Mzk3M0M1LjU2NTEzMSAxLjA3Mzk3MyA1LjU2NTEzMSAuODM2ODYyIDUuNTY1MTMxIC42Mjc2NDZWLTMuMjIxOTE4WicvPgo8cGF0aCBpZD0nZzUtNDknIGQ9J000LjAxNjkzNi04Ljk0MDQ3M0M0LjAxNjkzNi05LjI2MTI3IDQuMDE2OTM2LTkuMjc1MjE4IDMuNzM3OTgzLTkuMjc1MjE4QzMuNDAzMjM4LTguODk4NjMgMi43MDU4NTMtOC4zODI1NjUgMS4yNjkyNC04LjM4MjU2NVYtNy45NzgwODJDMS41OTAwMzctNy45NzgwODIgMi4yODc0MjItNy45NzgwODIgMy4wNTQ1NDUtOC4zNDA3MjJWLTEuMDczOTczQzMuMDU0NTQ1LS41NzE4NTYgMy4wMTI3MDItLjQwNDQ4MyAxLjc4NTMwNS0uNDA0NDgzSDEuMzUyOTI3VjBDMS43Mjk1MTQtLjAyNzg5NSAzLjA4MjQ0MS0uMDI3ODk1IDMuNTQyNzE1LS4wMjc4OTVTNS4zNDE5NjgtLjAyNzg5NSA1LjcxODU1NSAwVi0uNDA0NDgzSDUuMjg2MTc3QzQuMDU4NzgtLjQwNDQ4MyA0LjAxNjkzNi0uNTcxODU2IDQuMDE2OTM2LTEuMDczOTczVi04Ljk0MDQ3M1onLz4KPHBhdGggaWQ9J2c1LTUyJyBkPSdNNS4wMzUxMTgtOS4wNzk5NUM1LjAzNTExOC05LjM0NDk1NiA1LjAzNTExOC05LjQxNDY5NSA0LjgzOTg1MS05LjQxNDY5NUM0LjcyODI2OS05LjQxNDY5NSA0LjY4NjQyNi05LjQxNDY5NSA0LjU3NDg0NC05LjI0NzMyM0wuMzc2NTg4LTIuNzMzNzQ4Vi0yLjMyOTI2NUg0LjA0NDgzMlYtMS4wNjAwMjVDNC4wNDQ4MzItLjU0Mzk2IDQuMDE2OTM2LS40MDQ0ODMgMi45OTg3NTUtLjQwNDQ4M0gyLjcxOTgwMVYwQzMuMDQwNTk4LS4wMjc4OTUgNC4xNDI0NjYtLjAyNzg5NSA0LjUzMzAwMS0uMDI3ODk1UzYuMDM5MzUyLS4wMjc4OTUgNi4zNjAxNDkgMFYtLjQwNDQ4M0g2LjA4MTE5NkM1LjA3Njk2MS0uNDA0NDgzIDUuMDM1MTE4LS41NDM5NiA1LjAzNTExOC0xLjA2MDAyNVYtMi4zMjkyNjVINi40NDM4MzZWLTIuNzMzNzQ4SDUuMDM1MTE4Vi05LjA3OTk1Wk00LjExNDU3LTcuOTkyMDNWLTIuNzMzNzQ4SC43MjUyOEw0LjExNDU3LTcuOTkyMDNaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTkuNDE0Njk1LTQuNTE5MDU0QzkuNjA5OTYzLTQuNTE5MDU0IDkuODYxMDIxLTQuNTE5MDU0IDkuODYxMDIxLTQuNzcwMTEyQzkuODYxMDIxLTUuMDM1MTE4IDkuNjIzOTEtNS4wMzUxMTggOS40MTQ2OTUtNS4wMzUxMThIMS4xOTk1MDJDMS4wMDQyMzQtNS4wMzUxMTggLjc1MzE3Ni01LjAzNTExOCAuNzUzMTc2LTQuNzg0MDZDLjc1MzE3Ni00LjUxOTA1NCAuOTkwMjg2LTQuNTE5MDU0IDEuMTk5NTAyLTQuNTE5MDU0SDkuNDE0Njk1Wk05LjQxNDY5NS0xLjkyNDc4MkM5LjYwOTk2My0xLjkyNDc4MiA5Ljg2MTAyMS0xLjkyNDc4MiA5Ljg2MTAyMS0yLjE3NTg0MUM5Ljg2MTAyMS0yLjQ0MDg0NyA5LjYyMzkxLTIuNDQwODQ3IDkuNDE0Njk1LTIuNDQwODQ3SDEuMTk5NTAyQzEuMDA0MjM0LTIuNDQwODQ3IC43NTMxNzYtMi40NDA4NDcgLjc1MzE3Ni0yLjE4OTc4OEMuNzUzMTc2LTEuOTI0NzgyIC45OTAyODYtMS45MjQ3ODIgMS4xOTk1MDItMS45MjQ3ODJIOS40MTQ2OTVaJy8+CjxwYXRoIGlkPSdnNS0xMjYnIGQ9J001LjQ4MTQ0NS05LjI2MTI3QzUuMDc2OTYxLTguODU2Nzg3IDQuNzg0MDYtOC41Nzc4MzMgNC4zMzc3MzMtOC41Nzc4MzNDNC4xMjg1MTgtOC41Nzc4MzMgMy45MzMyNS04LjYxOTY3NiAzLjUwMDg3Mi04LjkxMjU3OEMzLjIyMTkxOC05LjA3OTk1IDIuOTQyOTY0LTkuMjYxMjcgMi42MjIxNjctOS4yNjEyN0MyLjEwNjEwMi05LjI2MTI3IDEuNzk5MjUzLTguOTEyNTc4IDEuMTQzNzExLTguMTg3Mjk4TDEuMzM4OTc5LTcuOTkyMDNDMS43NDM0NjItOC4zOTY1MTMgMi4wMzYzNjQtOC42NzU0NjcgMi40ODI2OS04LjY3NTQ2N0MyLjY5MTkwNS04LjY3NTQ2NyAyLjg4NzE3My04LjYzMzYyNCAzLjMxOTU1Mi04LjM0MDcyMkMzLjU5ODUwNi04LjE3MzM1IDMuODc3NDYtNy45OTIwMyA0LjE5ODI1Ny03Ljk5MjAzQzQuNzE0MzIxLTcuOTkyMDMgNS4wMjExNzEtOC4zNDA3MjIgNS42NzY3MTItOS4wNjYwMDJMNS40ODE0NDUtOS4yNjEyN1onLz4KPHBhdGggaWQ9J2cyLTYxJyBkPSdNNC4yODYxMDgtNi45NTE1MDFDNC4zMzQ5MjUtNy4wNzg0MjUgNC4zMzQ5MjUtNy4xMTc0NzggNC4zMzQ5MjUtNy4xMjcyNDJDNC4zMzQ5MjUtNy4yMzQ2MzggNC4yNDcwNTUtNy4zMjI1MDkgNC4xMzk2NTgtNy4zMjI1MDlDNC4wNzEzMTUtNy4zMjI1MDkgNC4wMDI5NzEtNy4yOTMyMTkgMy45NzM2ODEtNy4yMzQ2MzhMLjU4NTgwMSAyLjA2OTgyOUMuNTM2OTg0IDIuMTk2NzUzIC41MzY5ODQgMi4yMzU4MDYgLjUzNjk4NCAyLjI0NTU2OUMuNTM2OTg0IDIuMzUyOTY2IC42MjQ4NTQgMi40NDA4MzYgLjczMjI1MSAyLjQ0MDgzNkMuODU5MTc0IDIuNDQwODM2IC44ODg0NjQgMi4zNzI0OTMgLjk0NzA0NCAyLjIwNjUxNkw0LjI4NjEwOC02Ljk1MTUwMVonLz4KPHBhdGggaWQ9J2cyLTgyJyBkPSdNMy42NjEyNTQtNS45OTQ2OTRDMy43MTk4MzQtNi4yMjkwMTQgMy43NDkxMjQtNi4zMjY2NDcgMy45MzQ2MjgtNi4zNTU5MzdDNC4wMjI0OTgtNi4zNjU3MDEgNC4zMzQ5MjUtNi4zNjU3MDEgNC41MzAxOTItNi4zNjU3MDFDNS4yMjMzODktNi4zNjU3MDEgNi4zMDcxMjEtNi4zNjU3MDEgNi4zMDcxMjEtNS4zOTkxM0M2LjMwNzEyMS01LjA2NzE3NiA2LjE1MDkwNy00LjM5MzUwNSA1Ljc3MDEzNy00LjAxMjczNUM1LjUxNjI5LTMuNzU4ODg4IDQuOTk4ODMzLTMuNDQ2NDYxIDQuMTIwMTMxLTMuNDQ2NDYxSDMuMDI2NjM3TDMuNjYxMjU0LTUuOTk0Njk0Wk01LjA2NzE3Ni0zLjMxOTUzN0M2LjA1MzI3NC0zLjUzNDMzMSA3LjIxNTExMi00LjIxNzc2NSA3LjIxNTExMi01LjIwMzg2M0M3LjIxNTExMi02LjA0MzUxIDYuMzM2NDExLTYuNjY4MzY0IDUuMDU3NDEzLTYuNjY4MzY0SDIuMjc0ODU5QzIuMDc5NTkyLTYuNjY4MzY0IDEuOTkxNzIyLTYuNjY4MzY0IDEuOTkxNzIyLTYuNDczMDk4QzEuOTkxNzIyLTYuMzY1NzAxIDIuMDc5NTkyLTYuMzY1NzAxIDIuMjY1MDk2LTYuMzY1NzAxQzIuMjg0NjIzLTYuMzY1NzAxIDIuNDcwMTI2LTYuMzY1NzAxIDIuNjM2MTAzLTYuMzQ2MTc0QzIuODExODQzLTYuMzI2NjQ3IDIuODk5NzEzLTYuMzE2ODg0IDIuODk5NzEzLTYuMTg5OTYxQzIuODk5NzEzLTYuMTUwOTA3IDIuODg5OTUtNi4xMjE2MTcgMi44NjA2Ni02LjAwNDQ1N0wxLjU1MjM3Mi0uNzYxNTQxQzEuNDU0NzM4LS4zODA3NyAxLjQzNTIxMi0uMzAyNjY0IC42NjM5MDctLjMwMjY2NEMuNDg4MTY3LS4zMDI2NjQgLjQwMDI5Ny0uMzAyNjY0IC40MDAyOTctLjEwNzM5N0MuNDAwMjk3IDAgLjUxNzQ1NyAwIC41MzY5ODQgMEMuODEwMzU4IDAgMS40OTM3OTItLjAyOTI5IDEuNzY3MTY1LS4wMjkyOVMyLjczMzczNyAwIDMuMDA3MTEgMEMzLjA4NTIxNyAwIDMuMjAyMzc3IDAgMy4yMDIzNzctLjE5NTI2N0MzLjIwMjM3Ny0uMzAyNjY0IDMuMTE0NTA3LS4zMDI2NjQgMi45MjkwMDMtLjMwMjY2NEMyLjU2Nzc2LS4zMDI2NjQgMi4yOTQzODYtLjMwMjY2NCAyLjI5NDM4Ni0uNDc4NDA0QzIuMjk0Mzg2LS41MzY5ODQgMi4zMTM5MTMtLjU4NTgwMSAyLjMyMzY3Ni0uNjQ0MzgxTDIuOTY4MDU3LTMuMjMxNjY3SDQuMTI5ODk1QzUuMDE4MzU5LTMuMjMxNjY3IDUuMTk0MDk5LTIuNjg0OTIgNS4xOTQwOTktMi4zNDMyMDNDNS4xOTQwOTktMi4xOTY3NTMgNS4xMTU5OTMtMS44OTQwODkgNS4wNTc0MTMtMS42Njk1MzJDNC45ODkwNjktMS4zOTYxNTggNC45MDExOTktMS4wMzQ5MTUgNC45MDExOTktLjgzOTY0OEM0LjkwMTE5OSAuMjE0Nzk0IDYuMDcyOCAuMjE0Nzk0IDYuMTk5NzI0IC4yMTQ3OTRDNy4wMjk2MDggLjIxNDc5NCA3LjM3MTMyNS0uNzcxMzA0IDcuMzcxMzI1LS45MDc5OTFDNy4zNzEzMjUtMS4wMjUxNTEgNy4yNjM5MjgtMS4wMjUxNTEgNy4yNTQxNjUtMS4wMjUxNTFDNy4xNjYyOTUtMS4wMjUxNTEgNy4xNDY3NjgtLjk1NjgwOCA3LjEyNzI0Mi0uODg4NDY0QzYuODgzMTU4LS4xNjU5NzcgNi40NjMzMzQgMCA2LjIzODc3NyAwQzUuOTE2NTg3IDAgNS44NDgyNDMtLjIxNDc5NCA1Ljg0ODI0My0uNTk1NTY0QzUuODQ4MjQzLS44OTgyMjggNS45MDY4MjQtMS4zOTYxNTggNS45NDU4NzctMS43MDg1ODVDNS45NjU0MDQtMS44NDUyNzIgNS45ODQ5My0yLjAzMDc3NiA1Ljk4NDkzLTIuMTY3NDYzQzUuOTg0OTMtMi45MTkyNCA1LjMzMDc4Ni0zLjIyMTkwNCA1LjA2NzE3Ni0zLjMxOTUzN1onLz4KPHBhdGggaWQ9J2cyLTEwNScgZD0nTTIuNzcyNzktNi4xMDIwOUMyLjc3Mjc5LTYuMjk3MzU3IDIuNjM2MTAzLTYuNDUzNTcxIDIuNDExNTQ2LTYuNDUzNTcxQzIuMTQ3OTM2LTYuNDUzNTcxIDEuODg0MzI2LTYuMTk5NzI0IDEuODg0MzI2LTUuOTM2MTE0QzEuODg0MzI2LTUuNzUwNjEgMi4wMjEwMTItNS41ODQ2MzMgMi4yNTUzMzMtNS41ODQ2MzNDMi40Nzk4OS01LjU4NDYzMyAyLjc3Mjc5LTUuODA5MTkgMi43NzI3OS02LjEwMjA5Wk0yLjAzMDc3Ni0yLjQzMTA3M0MyLjE0NzkzNi0yLjcxNDIxIDIuMTQ3OTM2LTIuNzMzNzM3IDIuMjQ1NTY5LTIuOTk3MzQ3QzIuMzIzNjc2LTMuMTkyNjE0IDIuMzcyNDkzLTMuMzI5MzAxIDIuMzcyNDkzLTMuNTE0ODA0QzIuMzcyNDkzLTMuOTU0MTU1IDIuMDYwMDY2LTQuMzE1Mzk4IDEuNTcxODk5LTQuMzE1Mzk4Qy42NTQxNDQtNC4zMTUzOTggLjI4MzEzNy0yLjg5OTcxMyAuMjgzMTM3LTIuODExODQzQy4yODMxMzctMi43MTQyMSAuMzgwNzctMi43MTQyMSAuNDAwMjk3LTIuNzE0MjFDLjQ5NzkzMS0yLjcxNDIxIC41MDc2OTQtMi43MzM3MzcgLjU1NjUxMS0yLjg4OTk1Qy44MjAxMjEtMy44MDc3MDQgMS4yMTA2NTUtNC4xMDA2MDUgMS41NDI2MDgtNC4xMDA2MDVDMS42MjA3MTUtNC4xMDA2MDUgMS43ODY2OTItNC4xMDA2MDUgMS43ODY2OTItMy43ODgxNzhDMS43ODY2OTItMy41ODMxNDggMS43MTgzNDktMy4zNzgxMTcgMS42NzkyOTUtMy4yODA0ODRDMS42MDExODktMy4wMjY2MzcgMS4xNjE4MzgtMS44OTQwODkgMS4wMDU2MjUtMS40NzQyNjVDLjkwNzk5MS0xLjIyMDQxOCAuNzgxMDY4LS44OTgyMjggLjc4MTA2OC0uNjkzMTk3Qy43ODEwNjgtLjIzNDMyIDEuMTEzMDIxIC4xMDczOTcgMS41ODE2NjIgLjEwNzM5N0MyLjQ5OTQxNiAuMTA3Mzk3IDIuODYwNjYtMS4zMDgyODggMi44NjA2Ni0xLjM5NjE1OEMyLjg2MDY2LTEuNDkzNzkyIDIuNzcyNzktMS40OTM3OTIgMi43NDM1LTEuNDkzNzkyQzIuNjQ1ODY2LTEuNDkzNzkyIDIuNjQ1ODY2LTEuNDY0NTAyIDIuNTk3MDUtMS4zMTgwNTJDMi40MjEzMDktLjcwMjk2MSAyLjA5OTExOS0uMTA3Mzk3IDEuNjAxMTg5LS4xMDczOTdDMS40MzUyMTItLjEwNzM5NyAxLjM2Njg2OC0uMjA1MDMgMS4zNjY4NjgtLjQyOTU4N0MxLjM2Njg2OC0uNjczNjcxIDEuNDI1NDQ4LS44MTAzNTggMS42NTAwMDUtMS40MDU5MjJMMi4wMzA3NzYtMi40MzEwNzNaJy8+CjxwYXRoIGlkPSdnNC00MycgZD0nTTMuOTkzMjA4LTIuMjQ1NTY5SDYuNzE3MTgxQzYuODUzODY4LTIuMjQ1NTY5IDcuMDM5MzcyLTIuMjQ1NTY5IDcuMDM5MzcyLTIuNDQwODM2UzYuODUzODY4LTIuNjM2MTAzIDYuNzE3MTgxLTIuNjM2MTAzSDMuOTkzMjA4Vi01LjM2OTg0QzMuOTkzMjA4LTUuNTA2NTI2IDMuOTkzMjA4LTUuNjkyMDMgMy43OTc5NDEtNS42OTIwM1MzLjYwMjY3NC01LjUwNjUyNiAzLjYwMjY3NC01LjM2OTg0Vi0yLjYzNjEwM0guODY4OTM4Qy43MzIyNTEtMi42MzYxMDMgLjU0Njc0Ny0yLjYzNjEwMyAuNTQ2NzQ3LTIuNDQwODM2Uy43MzIyNTEtMi4yNDU1NjkgLjg2ODkzOC0yLjI0NTU2OUgzLjYwMjY3NFYuNDg4MTY3QzMuNjAyNjc0IC42MjQ4NTQgMy42MDI2NzQgLjgxMDM1OCAzLjc5Nzk0MSAuODEwMzU4UzMuOTkzMjA4IC42MjQ4NTQgMy45OTMyMDggLjQ4ODE2N1YtMi4yNDU1NjlaJy8+CjxwYXRoIGlkPSdnNC00OScgZD0nTTIuODcwNDIzLTYuMjQ4NTQxQzIuODcwNDIzLTYuNDgyODYxIDIuODcwNDIzLTYuNTAyMzg4IDIuNjQ1ODY2LTYuNTAyMzg4QzIuMDQwNTM5LTUuODc3NTM0IDEuMTgxMzY1LTUuODc3NTM0IC44Njg5MzgtNS44Nzc1MzRWLTUuNTc0ODdDMS4wNjQyMDUtNS41NzQ4NyAxLjY0MDI0Mi01LjU3NDg3IDIuMTQ3OTM2LTUuODI4NzE3Vi0uNzcxMzA0QzIuMTQ3OTM2LS40MTk4MjQgMi4xMTg2NDYtLjMwMjY2NCAxLjIzOTk0NS0uMzAyNjY0SC45Mjc1MThWMEMxLjI2OTIzNS0uMDI5MjkgMi4xMTg2NDYtLjAyOTI5IDIuNTA5MTgtLjAyOTI5UzMuNzQ5MTI0LS4wMjkyOSA0LjA5MDg0MSAwVi0uMzAyNjY0SDMuNzc4NDE0QzIuODk5NzEzLS4zMDI2NjQgMi44NzA0MjMtLjQxMDA2IDIuODcwNDIzLS43NzEzMDRWLTYuMjQ4NTQxWicvPgo8cGF0aCBpZD0nZzQtNTAnIGQ9J00xLjIzOTk0NS0uNzUxNzc4TDIuMjc0ODU5LTEuNzU3NDAyQzMuNzk3OTQxLTMuMTA0NzQ0IDQuMzgzNzQyLTMuNjMxOTY0IDQuMzgzNzQyLTQuNjA4Mjk5QzQuMzgzNzQyLTUuNzIxMzIgMy41MDUwNDEtNi41MDIzODggMi4zMTM5MTMtNi41MDIzODhDMS4yMTA2NTUtNi41MDIzODggLjQ4ODE2Ny01LjYwNDE2IC40ODgxNjctNC43MzUyMjJDLjQ4ODE2Ny00LjE4ODQ3NSAuOTc2MzM0LTQuMTg4NDc1IDEuMDA1NjI1LTQuMTg4NDc1QzEuMTcxNjAxLTQuMTg4NDc1IDEuNTEzMzE4LTQuMzA1NjM1IDEuNTEzMzE4LTQuNzA1OTMyQzEuNTEzMzE4LTQuOTU5Nzc5IDEuMzM3NTc4LTUuMjEzNjI2IC45OTU4NjEtNS4yMTM2MjZDLjkxNzc1NC01LjIxMzYyNiAuODk4MjI4LTUuMjEzNjI2IC44Njg5MzgtNS4yMDM4NjNDMS4wOTM0OTUtNS44Mzg0OCAxLjYyMDcxNS02LjE5OTcyNCAyLjE4Njk4OS02LjE5OTcyNEMzLjA3NTQ1NC02LjE5OTcyNCAzLjQ5NTI3Ny01LjQwODg5MyAzLjQ5NTI3Ny00LjYwODI5OUMzLjQ5NTI3Ny0zLjgyNzIzMSAzLjAwNzExLTMuMDU1OTI3IDIuNDcwMTI2LTIuNDUwNkwuNTk1NTY0LS4zNjEyNDRDLjQ4ODE2Ny0uMjUzODQ3IC40ODgxNjctLjIzNDMyIC40ODgxNjcgMEg0LjExMDM2OEw0LjM4Mzc0Mi0xLjY5ODgyMkg0LjEzOTY1OEM0LjA5MDg0MS0xLjQwNTkyMiA0LjAyMjQ5OC0uOTc2MzM0IDMuOTI0ODY1LS44Mjk4ODRDMy44NTY1MjEtLjc1MTc3OCAzLjIxMjE0LS43NTE3NzggMi45OTczNDctLjc1MTc3OEgxLjIzOTk0NVonLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J005LjE5MTUzMi0zLjIwNzk3QzkuNDI4NjQzLTMuMjA3OTcgOS42Nzk3MDEtMy4yMDc5NyA5LjY3OTcwMS0zLjQ4NjkyNFM5LjQyODY0My0zLjc2NTg3OCA5LjE5MTUzMi0zLjc2NTg3OEgxLjY0NTgyOEMxLjQwODcxNy0zLjc2NTg3OCAxLjE1NzY1OS0zLjc2NTg3OCAxLjE1NzY1OS0zLjQ4NjkyNFMxLjQwODcxNy0zLjIwNzk3IDEuNjQ1ODI4LTMuMjA3OTdIOS4xOTE1MzJaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PScxLjc2NTIzMScgeT0nLTE2LjkzMTA5MicgeGxpbms6aHJlZj0nI2c1LTEyNicvPgo8dXNlIHg9JzAnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzguMDgyNzg2JyB5PSctMTkuMDA5MzczJyB4bGluazpocmVmPScjZzItODInLz4KPHVzZSB4PSc4LjA4Mjc4NicgeT0nLTkuNDU1MzExJyB4bGluazpocmVmPScjZzItMTA1Jy8+Cjx1c2UgeD0nMTEuNDQ2Mzg0JyB5PSctOS40NTUzMTEnIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzE5LjA0MDEyNCcgeT0nLTkuNDU1MzExJyB4bGluazpocmVmPScjZzQtNDknLz4KPHVzZSB4PScyMy45MjE4MTUnIHk9Jy05LjQ1NTMxMScgeGxpbms6aHJlZj0nI2cyLTYxJy8+Cjx1c2UgeD0nMjguODAzNTA2JyB5PSctOS40NTUzMTEnIHhsaW5rOmhyZWY9JyNnNC01MCcvPgo8dXNlIHg9JzM4LjA1NzYxNycgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTYxJy8+Cjx1c2UgeD0nNTIuNTU0MDM2JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzMtMzAnLz4KPHVzZSB4PSc2MC42MzY4MjInIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PSc2NC4wMDA0MjEnIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzcxLjU5NDE2JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzQtNDknLz4KPHVzZSB4PSc4MC4wNzM0MjYnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nOTUuMjE2NjQ3JyB5PSctMjIuNjg2MTk4JyB4bGluazpocmVmPScjZzUtNDknLz4KPHJlY3QgeD0nOTUuMjE2NjQ3JyB5PSctMTcuMDE2MzU4JyBoZWlnaHQ9Jy41NTc4OScgd2lkdGg9JzYuODI4NDg5Jy8+Cjx1c2UgeD0nOTUuMjE2NjQ3JyB5PSctMy42ODMwNTcnIHhsaW5rOmhyZWY9JyNnNS01MicvPgo8dXNlIHg9JzEwNS41NjUyNDUnIHk9Jy0zMi45MTY5MDYnIHhsaW5rOmhyZWY9JyNnMC0yMCcvPgo8dXNlIHg9JzExMi45MjY1NTYnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzExOC4yMzc2MDMnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzEyOC4xNjU1NTMnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MycvPgo8dXNlIHg9JzE0MS44ODcxMDcnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMy0yMCcvPgo8dXNlIHg9JzE0OS43NDg3NTQnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MScvPgo8dXNlIHg9JzE1Ny4zODQzOTcnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS04Jy8+Cjx1c2UgeD0nMTY5LjU3MjM2NScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTQwJy8+Cjx1c2UgeD0nMTc0Ljg4MzQxMicgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2czLTExNCcvPgo8dXNlIHg9JzE4MS4wMzc5MzcnIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnMi04MicvPgo8dXNlIHg9JzE4OS4wMjQ2OCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMTk2LjY2MDMxNScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTQwJy8+Cjx1c2UgeD0nMjAxLjk3MTM2MScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2czLTMwJy8+Cjx1c2UgeD0nMjEwLjA1NDE0NycgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzIxMy40MTc3NDYnIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzIyMS4wMTE0ODUnIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8dXNlIHg9JzIyOS40OTA3NTEnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMjQzLjQzODQ1OCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2czLTMwJy8+Cjx1c2UgeD0nMjUxLjUyMTI0NCcgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzI1NS4zODI5NjgnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MScvPgo8dXNlIHg9JzI2My43OTM0MzgnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MycvPgo8dXNlIHg9JzI3Ny41MTQ5OTInIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00MCcvPgo8dXNlIHg9JzI4Mi44MjYwMzknIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8dXNlIHg9JzI5Mi43NTM5ODknIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMS0wJy8+Cjx1c2UgeD0nMzA2LjcwMTY5NicgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2czLTIwJy8+Cjx1c2UgeD0nMzE0LjU2MzM0NCcgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTQxJy8+Cjx1c2UgeD0nMzIyLjE5ODk3NScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTgnLz4KPHVzZSB4PSczMzQuMzg2OTQzJyB5PSctMzIuOTE2OTA2JyB4bGluazpocmVmPScjZzAtMTgnLz4KPHVzZSB4PSczNDkuNTA1OTUyJyB5PSctMjIuNjg2MTk4JyB4bGluazpocmVmPScjZzUtNDknLz4KPHJlY3QgeD0nMzQ1Ljg0OTU1OCcgeT0nLTE3LjAxNjM1OCcgaGVpZ2h0PScuNTU3ODknIHdpZHRoPScxNC4xNDEyNicvPgo8dXNlIHg9JzM0NS44NDk1NTgnIHk9Jy0zLjY4MzA1NycgeGxpbms6aHJlZj0nI2czLTExNCcvPgo8dXNlIHg9JzM1Mi4wMDQwODMnIHk9Jy0xLjU5MDkxMicgeGxpbms6aHJlZj0nI2cyLTgyJy8+Cjx1c2UgeD0nMzYxLjE4NjMzMicgeT0nLTMyLjkxNjkwNicgeGxpbms6aHJlZj0nI2cwLTE5Jy8+Cjx1c2UgeD0nMzczLjc3ODAyOScgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2c1LTQwJy8+Cjx1c2UgeD0nMzc5LjA4OTA3NicgeT0nLTEzLjI1MDQ4MicgeGxpbms6aHJlZj0nI2czLTMwJy8+Cjx1c2UgeD0nMzg3LjE3MTg2MicgeT0nLTExLjE1ODMzNicgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzM5MC41MzU0NjEnIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzM5OC4xMjkyJyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzQtNTAnLz4KPHVzZSB4PSc0MDYuNjA4NDY2JyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzQyMC41NTYxNzMnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzQyOC42Mzg5NTknIHk9Jy0xMS4xNTgzMzYnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PSc0MzIuMDAyNTU4JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzQtNDMnLz4KPHVzZSB4PSc0MzkuNTk2Mjk3JyB5PSctMTEuMTU4MzM2JyB4bGluazpocmVmPScjZzQtNDknLz4KPHVzZSB4PSc0NDQuOTc2MTAyJyB5PSctMTMuMjUwNDgyJyB4bGluazpocmVmPScjZzUtNDEnLz4KPHVzZSB4PSc0NTAuMjg3MTEnIHk9Jy0zMi45MTY5MDYnIHhsaW5rOmhyZWY9JyNnMC0yMScvPgo8dXNlIHg9JzQ1OS45NzMwMTcnIHk9Jy0xMy4yNTA0ODInIHhsaW5rOmhyZWY9JyNnMy01OScvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTAgLS0+)
where
(3.814)
(3.815)
The limiters are selected to be symmetric such that
(3.816)
The limited interpolation functions are
(3.817)
(3.818)
The interpolation for the points off the element edge is
(3.819)
(3.820)
where  is the distance vector along the element edge.
Symmetric limiter functions are:
is the distance vector along the element edge.
Symmetric limiter functions are:
(3.821)
(3.822)
(3.823)
3.4.4.6. Convection at an Inflow and Outflow Boundary
At an open boundary, the first-order and LPS upwind schemes only make use of information on the boundary.
For the MUSCL scheme with the flow leaving the domain at node ,
the usual flux limiters are not used. The slopes are compared
between  and
and  .
If the slopes are the same sign, the unlimited second order upwinding
is used. If the slopes are different, then a local interpolation is used.
Estimate the slope
.
If the slopes are the same sign, the unlimited second order upwinding
is used. If the slopes are different, then a local interpolation is used.
Estimate the slope  ,
where
,
where  is
the distance vector along the element edge.
For slopes of the same sign, use a second-order scheme,
is
the distance vector along the element edge.
For slopes of the same sign, use a second-order scheme,
(3.824)
else, use a first-order scheme,
(3.825)![\tilde{\phi}_{i}^L = \phi_{i} - {1 \over 2} \left[
\left( \phi_i - \phi_{i-1} \right) \right] .](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzE1MS44NzEwMTRwdCcgaGVpZ2h0PScyNy45OTE2NTZwdCcgdmlld0JveD0nMTE4LjMzNTk3OSAtMjcuOTkxNjcxIDE1MS44NzEwMTQgMjcuOTkxNjU2Jz4KPGRlZnM+CjxwYXRoIGlkPSdnNC00OScgZD0nTTIuODcwNDIzLTYuMjQ4NTQxQzIuODcwNDIzLTYuNDgyODYxIDIuODcwNDIzLTYuNTAyMzg4IDIuNjQ1ODY2LTYuNTAyMzg4QzIuMDQwNTM5LTUuODc3NTM0IDEuMTgxMzY1LTUuODc3NTM0IC44Njg5MzgtNS44Nzc1MzRWLTUuNTc0ODdDMS4wNjQyMDUtNS41NzQ4NyAxLjY0MDI0Mi01LjU3NDg3IDIuMTQ3OTM2LTUuODI4NzE3Vi0uNzcxMzA0QzIuMTQ3OTM2LS40MTk4MjQgMi4xMTg2NDYtLjMwMjY2NCAxLjIzOTk0NS0uMzAyNjY0SC45Mjc1MThWMEMxLjI2OTIzNS0uMDI5MjkgMi4xMTg2NDYtLjAyOTI5IDIuNTA5MTgtLjAyOTI5UzMuNzQ5MTI0LS4wMjkyOSA0LjA5MDg0MSAwVi0uMzAyNjY0SDMuNzc4NDE0QzIuODk5NzEzLS4zMDI2NjQgMi44NzA0MjMtLjQxMDA2IDIuODcwNDIzLS43NzEzMDRWLTYuMjQ4NTQxWicvPgo8cGF0aCBpZD0nZzMtMzAnIGQ9J001Ljk5NzUwOS05LjU1NDE3MkM1Ljk5NzUwOS05LjY3OTcwMSA1Ljg5OTg3NS05LjY3OTcwMSA1Ljg1ODAzMi05LjY3OTcwMUM1LjczMjUwMy05LjY3OTcwMSA1LjcxODU1NS05LjY1MTgwNiA1LjY2Mjc2NS05LjQxNDY5NUw0LjkwOTU4OS02LjQxNTk0QzQuODY3NzQ2LTYuMjM0NjIgNC44NTM3OTgtNi4yMjA2NzIgNC44Mzk4NTEtNi4yMDY3MjVDNC44MjU5MDMtNi4xNzg4MjkgNC43MjgyNjktNi4xNjQ4ODIgNC43MDAzNzQtNi4xNjQ4ODJDMi40MTI5NTEtNS45Njk2MTQgLjY1NTU0Mi00LjA4NjY3NSAuNjU1NTQyLTIuMzQzMjEzQy42NTU1NDItLjgzNjg2MiAxLjgxMzIgLjA4MzY4NiAzLjI2Mzc2MSAuMTY3MzcyQzMuMTUyMTc5IC41OTk3NTEgMy4wNTQ1NDUgMS4wNDYwNzcgMi45NDI5NjQgMS40Nzg0NTZDMi43NDc2OTYgMi4yMTc2ODQgMi42MzYxMTUgMi42Nzc5NTggMi42MzYxMTUgMi43MzM3NDhDMi42MzYxMTUgMi43NjE2NDQgMi42MzYxMTUgMi44NDUzMyAyLjc3NTU5MiAyLjg0NTMzQzIuODE3NDM1IDIuODQ1MzMgMi44NzMyMjUgMi44NDUzMyAyLjkwMTEyMSAyLjc4OTUzOUMyLjkyOTAxNiAyLjc2MTY0NCAzLjAxMjcwMiAyLjQyNjg5OSAzLjA2ODQ5MyAyLjI0NTU3OUwzLjU4NDU1OCAuMTY3MzcyQzUuOTY5NjE0IC4wNDE4NDMgNy43ODI4MTQtMS45MTA4MzQgNy43ODI4MTQtMy42NjgyNDRDNy43ODI4MTQtNS4wNzY5NjEgNi43MjI3OS02LjA4MTE5NiA1LjE3NDU5NS02LjE3ODgyOUw1Ljk5NzUwOS05LjU1NDE3MlpNNS4wOTA5MDktNS44OTk4NzVDNi4wMTE0NTctNS44NDQwODUgNi45MzIwMDUtNS4zMjgwMiA2LjkzMjAwNS0zLjk2MTE0NkM2LjkzMjAwNS0yLjM4NTA1NiA1LjgzMDEzNy0uMjkyOTAyIDMuNjU0Mjk2LS4xMjU1MjlMNS4wOTA5MDktNS44OTk4NzVaTTMuMzMzNDk5LS4xMTE1ODJDMi42NTAwNjItLjE1MzQyNSAxLjUwNjM1MS0uNTE2MDY1IDEuNTA2MzUxLTIuMDUwMzExQzEuNTA2MzUxLTMuODA3NzIxIDIuNzc1NTkyLTUuNzYwMzk5IDQuNzg0MDYtNS44ODU5MjhMMy4zMzM0OTktLjExMTU4MlonLz4KPHBhdGggaWQ9J2czLTU4JyBkPSdNMi41NjYzNzYtLjY2OTQ4OUMyLjU2NjM3Ni0xLjA3Mzk3MyAyLjIzMTYzMS0xLjM1MjkyNyAxLjg5Njg4Ny0xLjM1MjkyN0MxLjQ5MjQwMy0xLjM1MjkyNyAxLjIxMzQ1LTEuMDE4MTgyIDEuMjEzNDUtLjY4MzQzN0MxLjIxMzQ1LS4yNzg5NTQgMS41NDgxOTQgMCAxLjg4MjkzOSAwQzIuMjg3NDIyIDAgMi41NjYzNzYtLjMzNDc0NSAyLjU2NjM3Ni0uNjY5NDg5WicvPgo8cGF0aCBpZD0nZzAtMCcgZD0nTTYuNDM0MDQ0LTIuMjQ1NTY5QzYuNjAwMDIxLTIuMjQ1NTY5IDYuNzc1NzYxLTIuMjQ1NTY5IDYuNzc1NzYxLTIuNDQwODM2UzYuNjAwMDIxLTIuNjM2MTAzIDYuNDM0MDQ0LTIuNjM2MTAzSDEuMTUyMDc1Qy45ODYwOTgtMi42MzYxMDMgLjgxMDM1OC0yLjYzNjEwMyAuODEwMzU4LTIuNDQwODM2Uy45ODYwOTgtMi4yNDU1NjkgMS4xNTIwNzUtMi4yNDU1NjlINi40MzQwNDRaJy8+CjxwYXRoIGlkPSdnNS00MCcgZD0nTTQuNTMzMDAxIDMuMzg5MjlDNC41MzMwMDEgMy4zNDc0NDcgNC41MzMwMDEgMy4zMTk1NTIgNC4yOTU4OSAzLjA4MjQ0MUMyLjkwMTEyMSAxLjY3MzcyNCAyLjEyMDA1LS42Mjc2NDYgMi4xMjAwNS0zLjQ3Mjk3NkMyLjEyMDA1LTYuMTc4ODI5IDIuNzc1NTkyLTguNTA4MDk1IDQuMzkzNTI0LTEwLjE1MzkyM0M0LjUzMzAwMS0xMC4yNzk0NTIgNC41MzMwMDEtMTAuMzA3MzQ3IDQuNTMzMDAxLTEwLjM0OTE5MUM0LjUzMzAwMS0xMC40MzI4NzcgNC40NjMyNjMtMTAuNDYwNzcyIDQuNDA3NDcyLTEwLjQ2MDc3MkM0LjIyNjE1Mi0xMC40NjA3NzIgMy4wODI0NDEtOS40NTY1MzggMi4zOTkwMDQtOC4wODk2NjRDMS42ODc2NzEtNi42ODA5NDYgMS4zNjY4NzQtNS4xODg1NDMgMS4zNjY4NzQtMy40NzI5NzZDMS4zNjY4NzQtMi4yMzE2MzEgMS41NjIxNDItLjU3MTg1NiAyLjI4NzQyMiAuOTIwNTQ4QzMuMTEwMzM2IDIuNTk0MjcxIDQuMjU0MDQ3IDMuNTAwODcyIDQuNDA3NDcyIDMuNTAwODcyQzQuNDYzMjYzIDMuNTAwODcyIDQuNTMzMDAxIDMuNDcyOTc2IDQuNTMzMDAxIDMuMzg5MjlaJy8+CjxwYXRoIGlkPSdnNS00MScgZD0nTTMuOTMzMjUtMy40NzI5NzZDMy45MzMyNS00LjUzMzAwMSAzLjc5Mzc3My02LjI2MjUxNiAzLjAxMjcwMi03Ljg4MDQ0OEMyLjE4OTc4OC05LjU1NDE3MiAxLjA0NjA3Ny0xMC40NjA3NzIgLjg5MjY1My0xMC40NjA3NzJDLjgzNjg2Mi0xMC40NjA3NzIgLjc2NzEyMy0xMC40MzI4NzcgLjc2NzEyMy0xMC4zNDkxOTFDLjc2NzEyMy0xMC4zMDczNDcgLjc2NzEyMy0xMC4yNzk0NTIgMS4wMDQyMzQtMTAuMDQyMzQxQzIuMzk5MDA0LTguNjMzNjI0IDMuMTgwMDc1LTYuMzMyMjU0IDMuMTgwMDc1LTMuNDg2OTI0QzMuMTgwMDc1LS43ODEwNzEgMi41MjQ1MzMgMS41NDgxOTQgLjkwNjYgMy4xOTQwMjJDLjc2NzEyMyAzLjMxOTU1MiAuNzY3MTIzIDMuMzQ3NDQ3IC43NjcxMjMgMy4zODkyOUMuNzY3MTIzIDMuNDcyOTc2IC44MzY4NjIgMy41MDA4NzIgLjg5MjY1MyAzLjUwMDg3MkMxLjA3Mzk3MyAzLjUwMDg3MiAyLjIxNzY4NCAyLjQ5NjYzOCAyLjkwMTEyMSAxLjEyOTc2M0MzLjYxMjQ1My0uMjkyOTAyIDMuOTMzMjUtMS43OTkyNTMgMy45MzMyNS0zLjQ3Mjk3NlonLz4KPHBhdGggaWQ9J2c1LTQ5JyBkPSdNNC4wMTY5MzYtOC45NDA0NzNDNC4wMTY5MzYtOS4yNjEyNyA0LjAxNjkzNi05LjI3NTIxOCAzLjczNzk4My05LjI3NTIxOEMzLjQwMzIzOC04Ljg5ODYzIDIuNzA1ODUzLTguMzgyNTY1IDEuMjY5MjQtOC4zODI1NjVWLTcuOTc4MDgyQzEuNTkwMDM3LTcuOTc4MDgyIDIuMjg3NDIyLTcuOTc4MDgyIDMuMDU0NTQ1LTguMzQwNzIyVi0xLjA3Mzk3M0MzLjA1NDU0NS0uNTcxODU2IDMuMDEyNzAyLS40MDQ0ODMgMS43ODUzMDUtLjQwNDQ4M0gxLjM1MjkyN1YwQzEuNzI5NTE0LS4wMjc4OTUgMy4wODI0NDEtLjAyNzg5NSAzLjU0MjcxNS0uMDI3ODk1UzUuMzQxOTY4LS4wMjc4OTUgNS43MTg1NTUgMFYtLjQwNDQ4M0g1LjI4NjE3N0M0LjA1ODc4LS40MDQ0ODMgNC4wMTY5MzYtLjU3MTg1NiA0LjAxNjkzNi0xLjA3Mzk3M1YtOC45NDA0NzNaJy8+CjxwYXRoIGlkPSdnNS01MCcgZD0nTTYuMTM2OTg2LTIuMzQzMjEzSDUuODMwMTM3QzUuNzg4Mjk0LTIuMTA2MTAyIDUuNjc2NzEyLTEuMzM4OTc5IDUuNTM3MjM1LTEuMTE1ODE2QzUuNDM5NjAxLS45OTAyODYgNC42NDQ1ODMtLjk5MDI4NiA0LjIyNjE1Mi0uOTkwMjg2SDEuNjQ1ODI4QzIuMDIyNDE2LTEuMzExMDgzIDIuODczMjI1LTIuMjAzNzM2IDMuMjM1ODY2LTIuNTM4NDgxQzUuMzU1OTE1LTQuNDkxMTU4IDYuMTM2OTg2LTUuMjE2NDM4IDYuMTM2OTg2LTYuNTk3MjZDNi4xMzY5ODYtOC4yMDEyNDUgNC44Njc3NDYtOS4yNzUyMTggMy4yNDk4MTMtOS4yNzUyMThTLjY4MzQzNy03Ljg5NDM5NiAuNjgzNDM3LTYuNjk0ODk0Qy42ODM0MzctNS45ODM1NjIgMS4yOTcxMzYtNS45ODM1NjIgMS4zMzg5NzktNS45ODM1NjJDMS42MzE4OC01Ljk4MzU2MiAxLjk5NDUyMS02LjE5Mjc3NyAxLjk5NDUyMS02LjYzOTEwM0MxLjk5NDUyMS03LjAyOTYzOSAxLjcyOTUxNC03LjI5NDY0NSAxLjMzODk3OS03LjI5NDY0NUMxLjIxMzQ1LTcuMjk0NjQ1IDEuMTg1NTU0LTcuMjk0NjQ1IDEuMTQzNzExLTcuMjgwNjk3QzEuNDA4NzE3LTguMjI5MTQxIDIuMTYxODkzLTguODcwNzM1IDMuMDY4NDkzLTguODcwNzM1QzQuMjU0MDQ3LTguODcwNzM1IDQuOTc5MzI4LTcuODgwNDQ4IDQuOTc5MzI4LTYuNTk3MjZDNC45NzkzMjgtNS40MTE3MDYgNC4yOTU4OS00LjM3OTU3NyAzLjUwMDg3Mi0zLjQ4NjkyNEwuNjgzNDM3LS4zMzQ3NDVWMEg1Ljc3NDM0Nkw2LjEzNjk4Ni0yLjM0MzIxM1onLz4KPHBhdGggaWQ9J2c1LTYxJyBkPSdNOS40MTQ2OTUtNC41MTkwNTRDOS42MDk5NjMtNC41MTkwNTQgOS44NjEwMjEtNC41MTkwNTQgOS44NjEwMjEtNC43NzAxMTJDOS44NjEwMjEtNS4wMzUxMTggOS42MjM5MS01LjAzNTExOCA5LjQxNDY5NS01LjAzNTExOEgxLjE5OTUwMkMxLjAwNDIzNC01LjAzNTExOCAuNzUzMTc2LTUuMDM1MTE4IC43NTMxNzYtNC43ODQwNkMuNzUzMTc2LTQuNTE5MDU0IC45OTAyODYtNC41MTkwNTQgMS4xOTk1MDItNC41MTkwNTRIOS40MTQ2OTVaTTkuNDE0Njk1LTEuOTI0NzgyQzkuNjA5OTYzLTEuOTI0NzgyIDkuODYxMDIxLTEuOTI0NzgyIDkuODYxMDIxLTIuMTc1ODQxQzkuODYxMDIxLTIuNDQwODQ3IDkuNjIzOTEtMi40NDA4NDcgOS40MTQ2OTUtMi40NDA4NDdIMS4xOTk1MDJDMS4wMDQyMzQtMi40NDA4NDcgLjc1MzE3Ni0yLjQ0MDg0NyAuNzUzMTc2LTIuMTg5Nzg4Qy43NTMxNzYtMS45MjQ3ODIgLjk5MDI4Ni0xLjkyNDc4MiAxLjE5OTUwMi0xLjkyNDc4Mkg5LjQxNDY5NVonLz4KPHBhdGggaWQ9J2c1LTkxJyBkPSdNMy40ODY5MjQgMy40ODY5MjRWMi45NzA4NTlIMi4xMzM5OThWLTkuOTQ0NzA3SDMuNDg2OTI0Vi0xMC40NjA3NzJIMS42MTc5MzNWMy40ODY5MjRIMy40ODY5MjRaJy8+CjxwYXRoIGlkPSdnNS05MycgZD0nTTIuMTYxODkzLTEwLjQ2MDc3MkguMjkyOTAyVi05Ljk0NDcwN0gxLjY0NTgyOFYyLjk3MDg1OUguMjkyOTAyVjMuNDg2OTI0SDIuMTYxODkzVi0xMC40NjA3NzJaJy8+CjxwYXRoIGlkPSdnNS0xMjYnIGQ9J001LjQ4MTQ0NS05LjI2MTI3QzUuMDc2OTYxLTguODU2Nzg3IDQuNzg0MDYtOC41Nzc4MzMgNC4zMzc3MzMtOC41Nzc4MzNDNC4xMjg1MTgtOC41Nzc4MzMgMy45MzMyNS04LjYxOTY3NiAzLjUwMDg3Mi04LjkxMjU3OEMzLjIyMTkxOC05LjA3OTk1IDIuOTQyOTY0LTkuMjYxMjcgMi42MjIxNjctOS4yNjEyN0MyLjEwNjEwMi05LjI2MTI3IDEuNzk5MjUzLTguOTEyNTc4IDEuMTQzNzExLTguMTg3Mjk4TDEuMzM4OTc5LTcuOTkyMDNDMS43NDM0NjItOC4zOTY1MTMgMi4wMzYzNjQtOC42NzU0NjcgMi40ODI2OS04LjY3NTQ2N0MyLjY5MTkwNS04LjY3NTQ2NyAyLjg4NzE3My04LjYzMzYyNCAzLjMxOTU1Mi04LjM0MDcyMkMzLjU5ODUwNi04LjE3MzM1IDMuODc3NDYtNy45OTIwMyA0LjE5ODI1Ny03Ljk5MjAzQzQuNzE0MzIxLTcuOTkyMDMgNS4wMjExNzEtOC4zNDA3MjIgNS42NzY3MTItOS4wNjYwMDJMNS40ODE0NDUtOS4yNjEyN1onLz4KPHBhdGggaWQ9J2cyLTc2JyBkPSdNMy42NTE0OTEtNS45MDY4MjRDMy43MzkzNjEtNi4yNTgzMDQgMy43Njg2NTEtNi4zNjU3MDEgNC42ODY0MDUtNi4zNjU3MDFDNC45NzkzMDYtNi4zNjU3MDEgNS4wNTc0MTMtNi4zNjU3MDEgNS4wNTc0MTMtNi41NTEyMDRDNS4wNTc0MTMtNi42NjgzNjQgNC45NTAwMTYtNi42NjgzNjQgNC45MDExOTktNi42NjgzNjRDNC41NzkwMDktNi42NjgzNjQgMy43Nzg0MTQtNi42MzkwNzQgMy40NTYyMjQtNi42MzkwNzRDMy4xNjMzMjQtNi42MzkwNzQgMi40NTA2LTYuNjY4MzY0IDIuMTU3Njk5LTYuNjY4MzY0QzIuMDg5MzU2LTYuNjY4MzY0IDEuOTcyMTk2LTYuNjY4MzY0IDEuOTcyMTk2LTYuNDczMDk4QzEuOTcyMTk2LTYuMzY1NzAxIDIuMDYwMDY2LTYuMzY1NzAxIDIuMjQ1NTY5LTYuMzY1NzAxQzIuMjY1MDk2LTYuMzY1NzAxIDIuNDUwNi02LjM2NTcwMSAyLjYxNjU3Ni02LjM0NjE3NEMyLjc5MjMxNy02LjMyNjY0NyAyLjg4MDE4Ny02LjMxNjg4NCAyLjg4MDE4Ny02LjE4OTk2MUMyLjg4MDE4Ny02LjE1MDkwNyAyLjg3MDQyMy02LjEyMTYxNyAyLjg0MTEzMy02LjAwNDQ1N0wxLjUzMjg0NS0uNzYxNTQxQzEuNDM1MjEyLS4zODA3NyAxLjQxNTY4NS0uMzAyNjY0IC42NDQzODEtLjMwMjY2NEMuNDc4NDA0LS4zMDI2NjQgLjM4MDc3LS4zMDI2NjQgLjM4MDc3LS4xMDczOTdDLjM4MDc3IDAgLjQ2ODY0MSAwIC42NDQzODEgMEg1LjE2NDgwOUM1LjM5OTEzIDAgNS40MDg4OTMgMCA1LjQ2NzQ3My0uMTY1OTc3TDYuMjM4Nzc3LTIuMjc0ODU5QzYuMjc3ODMxLTIuMzgyMjU2IDYuMjc3ODMxLTIuNDAxNzgzIDYuMjc3ODMxLTIuNDExNTQ2QzYuMjc3ODMxLTIuNDUwNiA2LjI0ODU0MS0yLjUxODk0MyA2LjE2MDY3MS0yLjUxODk0M1M2LjA2MzAzNy0yLjQ3MDEyNiA1Ljk5NDY5NC0yLjMxMzkxM0M1LjY2Mjc0LTEuNDE1Njg1IDUuMjMzMTUzLS4zMDI2NjQgMy41NDQwOTQtLjMwMjY2NEgyLjYyNjM0QzIuNDg5NjUzLS4zMDI2NjQgMi40NzAxMjYtLjMwMjY2NCAyLjQxMTU0Ni0uMzEyNDI3QzIuMzEzOTEzLS4zMjIxOSAyLjI4NDYyMy0uMzMxOTU0IDIuMjg0NjIzLS40MTAwNkMyLjI4NDYyMy0uNDM5MzUxIDIuMjg0NjIzLS40NTg4NzcgMi4zMzM0MzktLjYzNDYxN0wzLjY1MTQ5MS01LjkwNjgyNFonLz4KPHBhdGggaWQ9J2cyLTEwNScgZD0nTTIuNzcyNzktNi4xMDIwOUMyLjc3Mjc5LTYuMjk3MzU3IDIuNjM2MTAzLTYuNDUzNTcxIDIuNDExNTQ2LTYuNDUzNTcxQzIuMTQ3OTM2LTYuNDUzNTcxIDEuODg0MzI2LTYuMTk5NzI0IDEuODg0MzI2LTUuOTM2MTE0QzEuODg0MzI2LTUuNzUwNjEgMi4wMjEwMTItNS41ODQ2MzMgMi4yNTUzMzMtNS41ODQ2MzNDMi40Nzk4OS01LjU4NDYzMyAyLjc3Mjc5LTUuODA5MTkgMi43NzI3OS02LjEwMjA5Wk0yLjAzMDc3Ni0yLjQzMTA3M0MyLjE0NzkzNi0yLjcxNDIxIDIuMTQ3OTM2LTIuNzMzNzM3IDIuMjQ1NTY5LTIuOTk3MzQ3QzIuMzIzNjc2LTMuMTkyNjE0IDIuMzcyNDkzLTMuMzI5MzAxIDIuMzcyNDkzLTMuNTE0ODA0QzIuMzcyNDkzLTMuOTU0MTU1IDIuMDYwMDY2LTQuMzE1Mzk4IDEuNTcxODk5LTQuMzE1Mzk4Qy42NTQxNDQtNC4zMTUzOTggLjI4MzEzNy0yLjg5OTcxMyAuMjgzMTM3LTIuODExODQzQy4yODMxMzctMi43MTQyMSAuMzgwNzctMi43MTQyMSAuNDAwMjk3LTIuNzE0MjFDLjQ5NzkzMS0yLjcxNDIxIC41MDc2OTQtMi43MzM3MzcgLjU1NjUxMS0yLjg4OTk1Qy44MjAxMjEtMy44MDc3MDQgMS4yMTA2NTUtNC4xMDA2MDUgMS41NDI2MDgtNC4xMDA2MDVDMS42MjA3MTUtNC4xMDA2MDUgMS43ODY2OTItNC4xMDA2MDUgMS43ODY2OTItMy43ODgxNzhDMS43ODY2OTItMy41ODMxNDggMS43MTgzNDktMy4zNzgxMTcgMS42NzkyOTUtMy4yODA0ODRDMS42MDExODktMy4wMjY2MzcgMS4xNjE4MzgtMS44OTQwODkgMS4wMDU2MjUtMS40NzQyNjVDLjkwNzk5MS0xLjIyMDQxOCAuNzgxMDY4LS44OTgyMjggLjc4MTA2OC0uNjkzMTk3Qy43ODEwNjgtLjIzNDMyIDEuMTEzMDIxIC4xMDczOTcgMS41ODE2NjIgLjEwNzM5N0MyLjQ5OTQxNiAuMTA3Mzk3IDIuODYwNjYtMS4zMDgyODggMi44NjA2Ni0xLjM5NjE1OEMyLjg2MDY2LTEuNDkzNzkyIDIuNzcyNzktMS40OTM3OTIgMi43NDM1LTEuNDkzNzkyQzIuNjQ1ODY2LTEuNDkzNzkyIDIuNjQ1ODY2LTEuNDY0NTAyIDIuNTk3MDUtMS4zMTgwNTJDMi40MjEzMDktLjcwMjk2MSAyLjA5OTExOS0uMTA3Mzk3IDEuNjAxMTg5LS4xMDczOTdDMS40MzUyMTItLjEwNzM5NyAxLjM2Njg2OC0uMjA1MDMgMS4zNjY4NjgtLjQyOTU4N0MxLjM2Njg2OC0uNjczNjcxIDEuNDI1NDQ4LS44MTAzNTggMS42NTAwMDUtMS40MDU5MjJMMi4wMzA3NzYtMi40MzEwNzNaJy8+Cjx1c2UgaWQ9J2cxLTAnIHhsaW5rOmhyZWY9JyNnMC0wJyB0cmFuc2Zvcm09J3NjYWxlKDEuNDI4NTc4KScvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMTIwLjEwMTIxJyB5PSctMTMuMjQ4MDQ5JyB4bGluazpocmVmPScjZzUtMTI2Jy8+Cjx1c2UgeD0nMTE4LjMzNTk3OScgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzMtMzAnLz4KPHVzZSB4PScxMjYuNDE4NzY1JyB5PSctMTUuMzI2MzMxJyB4bGluazpocmVmPScjZzItNzYnLz4KPHVzZSB4PScxMjYuNDE4NzY1JyB5PSctNi4xMTkzNDEnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PScxMzcuNDM1NzEyJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNS02MScvPgo8dXNlIHg9JzE1MS45MzIxMzEnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2czLTMwJy8+Cjx1c2UgeD0nMTYwLjAxNDkxNycgeT0nLTcuNDc1Mjk0JyB4bGluazpocmVmPScjZzItMTA1Jy8+Cjx1c2UgeD0nMTY2Ljk3NjEwMicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzEtMCcvPgo8dXNlIHg9JzE4Mi4xMTkzMjMnIHk9Jy0xOS4wMDMxNTUnIHhsaW5rOmhyZWY9JyNnNS00OScvPgo8cmVjdCB4PScxODIuMTE5MzIzJyB5PSctMTMuMzMzMzE2JyBoZWlnaHQ9Jy41NTc4OScgd2lkdGg9JzYuODI4NDg5Jy8+Cjx1c2UgeD0nMTgyLjExOTMyMycgeT0nLS4wMDAwMTUnIHhsaW5rOmhyZWY9JyNnNS01MCcvPgo8dXNlIHg9JzE5Mi40Njc5MjInIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2c1LTkxJy8+Cjx1c2UgeD0nMTk2LjI2MTUyNicgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDAnLz4KPHVzZSB4PScyMDEuNTcyNTczJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzIwOS42NTUzNTknIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzIxNi42MTY1NDQnIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PScyMzAuNTY0MjUxJyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnMy0zMCcvPgo8dXNlIHg9JzIzOC42NDcwMzcnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzI0Mi4wMTA2MzYnIHk9Jy03LjQ3NTI5NCcgeGxpbms6aHJlZj0nI2cwLTAnLz4KPHVzZSB4PScyNDkuNjA0Mzc1JyB5PSctNy40NzUyOTQnIHhsaW5rOmhyZWY9JyNnNC00OScvPgo8dXNlIHg9JzI1NC45ODQxOCcgeT0nLTkuNTY3NDM5JyB4bGluazpocmVmPScjZzUtNDEnLz4KPHVzZSB4PScyNjAuMjk1MTg5JyB5PSctOS41Njc0MzknIHhsaW5rOmhyZWY9JyNnNS05MycvPgo8dXNlIHg9JzI2Ni40MTMzODknIHk9Jy05LjU2NzQzOScgeGxpbms6aHJlZj0nI2czLTU4Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9MCAtLT4=)
The boundary is the left (L) side.
If the flow enters the domain, then use the local value of .
3.4.4.7. Nonlinear stabilization operator
The “nonlinear stability operator” (NSO) in Fuego is an artificial viscosity method where the added diffusivity is based on a scaled, pointwise evaluated residual. For a dual volume ( ), associated with a node
), associated with a node  , the weak form of the NSO for a scalar variable
, the weak form of the NSO for a scalar variable  is
is
(3.826)
where  depends on the evaluation of a local residual
depends on the evaluation of a local residual  and the gradient of as
and the gradient of as
(3.827)
The local residual can be taken, similar to Shakib:cite:Shakib:1991 but in an incompressible context, as the full residual of the PDE. For a conserved scalar,:math:q, with diffusivity  , would be
, would be
(3.828)![R = \left[\left(\operatorname{Time}\right)_\rho + \left(\operatorname{Adv.}\right)_{\rho \mathbf{u}} - \left(\operatorname{Diff.}\right)_{\rho \Gamma}\right]q,](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzIzNi41MTk2MTRwdCcgaGVpZ2h0PScyNS4xMDYxMDhwdCcgdmlld0JveD0nNzYuMDExNjc5IC0yNS4xMDYwOTcgMjM2LjUxOTYxNCAyNS4xMDYxMDgnPgo8ZGVmcz4KPHBhdGggaWQ9J2c1LTAnIGQ9J001LjQwODg5My02LjYzOTA3NEguMzIyMTlWLTYuMzM2NDExSC41NTY1MTFDMS4zMDgyODgtNi4zMzY0MTEgMS4zMjc4MTUtNi4yMjkwMTQgMS4zMjc4MTUtNS44Nzc1MzRWLS43NjE1NDFDMS4zMjc4MTUtLjQxMDA2IDEuMzA4Mjg4LS4zMDI2NjQgLjU1NjUxMS0uMzAyNjY0SC4zMjIxOVYwQy42NjM5MDctLjAyOTI5IDEuNDI1NDQ4LS4wMjkyOSAxLjgwNjIxOS0uMDI5MjlDMi4yMDY1MTYtLjAyOTI5IDMuMDk0OTgtLjAyOTI5IDMuNDQ2NDYxIDBWLS4zMDI2NjRIMy4xMjQyN0MyLjE5Njc1My0uMzAyNjY0IDIuMTk2NzUzLS40Mjk1ODcgMi4xOTY3NTMtLjc3MTMwNFYtNS45NDU4NzdDMi4xOTY3NTMtNi4yNjgwNjcgMi4yMTYyNzktNi4zMzY0MTEgMi42NzUxNTYtNi4zMzY0MTFIMy42ODA3ODFDNS4wNzY5MzktNi4zMzY0MTEgNS4yODE5Ny01Ljc2MDM3MyA1LjQzODE4My00LjQ0MjMyMkg1LjY4MjI2N0w1LjQwODg5My02LjYzOTA3NFonLz4KPHBhdGggaWQ9J2cyLTAnIGQ9J005LjE5MTUzMi0zLjIwNzk3QzkuNDI4NjQzLTMuMjA3OTcgOS42Nzk3MDEtMy4yMDc5NyA5LjY3OTcwMS0zLjQ4NjkyNFM5LjQyODY0My0zLjc2NTg3OCA5LjE5MTUzMi0zLjc2NTg3OEgxLjY0NTgyOEMxLjQwODcxNy0zLjc2NTg3OCAxLjE1NzY1OS0zLjc2NTg3OCAxLjE1NzY1OS0zLjQ4NjkyNFMxLjQwODcxNy0zLjIwNzk3IDEuNjQ1ODI4LTMuMjA3OTdIOS4xOTE1MzJaJy8+CjxwYXRoIGlkPSdnNC01OCcgZD0nTTIuNTY2Mzc2LS42Njk0ODlDMi41NjYzNzYtMS4wNzM5NzMgMi4yMzE2MzEtMS4zNTI5MjcgMS44OTY4ODctMS4zNTI5MjdDMS40OTI0MDMtMS4zNTI5MjcgMS4yMTM0NS0xLjAxODE4MiAxLjIxMzQ1LS42ODM0MzdDMS4yMTM0NS0uMjc4OTU0IDEuNTQ4MTk0IDAgMS44ODI5MzkgMEMyLjI4NzQyMiAwIDIuNTY2Mzc2LS4zMzQ3NDUgMi41NjYzNzYtLjY2OTQ4OVonLz4KPHBhdGggaWQ9J2c0LTU5JyBkPSdNMi43MTk4MDEgLjA1NTc5MUMyLjcxOTgwMS0uNzUzMTc2IDIuNDU0Nzk1LTEuMzUyOTI3IDEuODgyOTM5LTEuMzUyOTI3QzEuNDM2NjEzLTEuMzUyOTI3IDEuMjEzNDUtLjk5MDI4NiAxLjIxMzQ1LS42ODM0MzdTMS40MjI2NjUgMCAxLjg5Njg4NyAwQzIuMDc4MjA3IDAgMi4yMzE2MzEtLjA1NTc5MSAyLjM1NzE2MS0uMTgxMzJDMi4zODUwNTYtLjIwOTIxNSAyLjM5OTAwNC0uMjA5MjE1IDIuNDEyOTUxLS4yMDkyMTVDMi40NDA4NDctLjIwOTIxNSAyLjQ0MDg0Ny0uMDEzOTQ4IDIuNDQwODQ3IC4wNTU3OTFDMi40NDA4NDcgLjUxNjA2NSAyLjM1NzE2MSAxLjQyMjY2NSAxLjU0ODE5NCAyLjMyOTI2NUMxLjM5NDc3IDIuNDk2NjM4IDEuMzk0NzcgMi41MjQ1MzMgMS4zOTQ3NyAyLjU1MjQyOEMxLjM5NDc3IDIuNjIyMTY3IDEuNDY0NTA4IDIuNjkxOTA1IDEuNTM0MjQ3IDIuNjkxOTA1QzEuNjQ1ODI4IDIuNjkxOTA1IDIuNzE5ODAxIDEuNjU5Nzc2IDIuNzE5ODAxIC4wNTU3OTFaJy8+CjxwYXRoIGlkPSdnNC04MicgZD0nTTUuMTMyNzUyLTguNTc3ODMzQzUuMjU4MjgxLTkuMDkzODk4IDUuMzE0MDcyLTkuMTIxNzkzIDUuODU4MDMyLTkuMTIxNzkzSDYuODYyMjY3QzguMDYxNzY4LTkuMTIxNzkzIDguOTU0NDIxLTguNzU5MTUzIDguOTU0NDIxLTcuNjcxMjMzQzguOTU0NDIxLTYuOTU5OSA4LjU5MTc4MS00LjkwOTU4OSA1Ljc4ODI5NC00LjkwOTU4OUg0LjIxMjIwNEw1LjEzMjc1Mi04LjU3NzgzM1pNNy4wNzE0ODItNC43NDIyMTdDOC44MDA5OTYtNS4xMTg4MDQgMTAuMTUzOTIzLTYuMjM0NjIgMTAuMTUzOTIzLTcuNDM0MTIyQzEwLjE1MzkyMy04LjUyMjA0MiA5LjA1MjA1NS05LjUyNjI3NiA3LjExMzMyNS05LjUyNjI3NkgzLjMzMzQ5OUMzLjA1NDU0NS05LjUyNjI3NiAyLjkyOTAxNi05LjUyNjI3NiAyLjkyOTAxNi05LjI2MTI3QzIuOTI5MDE2LTkuMTIxNzkzIDMuMDI2NjUtOS4xMjE3OTMgMy4yOTE2NTYtOS4xMjE3OTNDNC4xMjg1MTgtOS4xMjE3OTMgNC4xMjg1MTgtOS4wMTAyMTIgNC4xMjg1MTgtOC44NTY3ODdDNC4xMjg1MTgtOC44Mjg4OTIgNC4xMjg1MTgtOC43NDUyMDUgNC4wNzI3MjctOC41MzU5OUwyLjE4OTc4OC0xLjAzMjEzQzIuMDY0MjU5LS41NDM5NiAyLjAzNjM2NC0uNDA0NDgzIDEuMDczOTczLS40MDQ0ODNDLjc1MzE3Ni0uNDA0NDgzIC42NTU1NDItLjQwNDQ4MyAuNjU1NTQyLS4xMzk0NzdDLjY1NTU0MiAwIC44MDg5NjYgMCAuODUwODA5IDBDMS4xMDE4NjggMCAxLjM5NDc3LS4wMjc4OTUgMS42NTk3NzYtLjAyNzg5NUgzLjMwNTYwNEMzLjU1NjY2My0uMDI3ODk1IDMuODQ5NTY0IDAgNC4xMDA2MjMgMEM0LjIxMjIwNCAwIDQuMzY1NjI5IDAgNC4zNjU2MjktLjI2NTAwNkM0LjM2NTYyOS0uNDA0NDgzIDQuMjQwMS0uNDA0NDgzIDQuMDMwODg0LS40MDQ0ODNDMy4xODAwNzUtLjQwNDQ4MyAzLjE4MDA3NS0uNTE2MDY1IDMuMTgwMDc1LS42NTU1NDJDMy4xODAwNzUtLjY2OTQ4OSAzLjE4MDA3NS0uNzY3MTIzIDMuMjA3OTctLjg3ODcwNUw0LjE0MjQ2Ni00LjYzMDYzNUg1LjgxNjE4OUM3LjE0MTIyLTQuNjMwNjM1IDcuMzkyMjc5LTMuNzkzNzczIDcuMzkyMjc5LTMuMzMzNDk5QzcuMzkyMjc5LTMuMTI0Mjg0IDcuMjUyODAyLTIuNTgwMzI0IDcuMTU1MTY4LTIuMjE3Njg0QzcuMDAxNzQzLTEuNTc2MDkgNi45NTk5LTEuNDIyNjY1IDYuOTU5OS0xLjE1NzY1OUM2Ljk1OTktLjE2NzM3MiA3Ljc2ODg2NyAuMjkyOTAyIDguNzAzMzYyIC4yOTI5MDJDOS44MzMxMjYgLjI5MjkwMiAxMC4zMjEyOTUtMS4wODc5MiAxMC4zMjEyOTUtMS4yODMxODhDMTAuMzIxMjk1LTEuMzgwODIyIDEwLjI1MTU1Ny0xLjQyMjY2NSAxMC4xNjc4Ny0xLjQyMjY2NUMxMC4wNTYyODktMS40MjI2NjUgMTAuMDI4Mzk0LTEuMzM4OTc5IDEwLjAwMDQ5OC0xLjIyNzM5N0M5LjY2NTc1My0uMjM3MTExIDkuMDkzODk4IC4wMTM5NDggOC43NDUyMDUgLjAxMzk0OFM4LjE3MzM1LS4xMzk0NzcgOC4xNzMzNS0uNzY3MTIzQzguMTczMzUtMS4xMDE4NjggOC4zNDA3MjItMi4zNzExMDggOC4zNTQ2Ny0yLjQ0MDg0N0M4LjQyNDQwOC0yLjk1NjkxMiA4LjQyNDQwOC0zLjAxMjcwMiA4LjQyNDQwOC0zLjEyNDI4NEM4LjQyNDQwOC00LjE0MjQ2NiA3LjYwMTQ5NC00LjU3NDg0NCA3LjA3MTQ4Mi00Ljc0MjIxN1onLz4KPHBhdGggaWQ9J2c0LTExMycgZD0nTTYuMTUwOTM0LTYuMDExNDU3QzYuMTUwOTM0LTYuMDgxMTk2IDYuMDk1MTQzLTYuMTM2OTg2IDYuMDI1NDA1LTYuMTM2OTg2QzUuOTEzODIzLTYuMTM2OTg2IDUuMzY5ODYzLTUuNjM0ODY5IDUuMTA0ODU3LTUuMTQ2N0M0Ljg1Mzc5OC01Ljc3NDM0NiA0LjQyMTQyLTYuMTUwOTM0IDMuODIxNjY5LTYuMTUwOTM0QzIuMjQ1NTc5LTYuMTUwOTM0IC41NDM5Ni00LjExNDU3IC41NDM5Ni0yLjA1MDMxMUMuNTQzOTYtLjY2OTQ4OSAxLjM1MjkyNyAuMTM5NDc3IDIuMzAxMzcgLjEzOTQ3N0MzLjA0MDU5OCAuMTM5NDc3IDMuNjU0Mjk2LS40MTg0MzEgMy45NDcxOTgtLjczOTIyOEwzLjk2MTE0Ni0uNzI1MjhMMy40MzExMzMgMS4zNjY4NzRMMy4zMDU2MDQgMS44Njg5OTFDMy4xODAwNzUgMi4yODc0MjIgMi45NzA4NTkgMi4yODc0MjIgMi4zMTUzMTggMi4zMDEzN0MyLjE2MTg5MyAyLjMwMTM3IDIuMDIyNDE2IDIuMzAxMzcgMi4wMjI0MTYgMi41NjYzNzZDMi4wMjI0MTYgMi42NjQwMSAyLjEwNjEwMiAyLjcwNTg1MyAyLjIwMzczNiAyLjcwNTg1M0MyLjM5OTAwNCAyLjcwNTg1MyAyLjY1MDA2MiAyLjY3Nzk1OCAyLjg0NTMzIDIuNjc3OTU4SDQuMjY3OTk1QzQuNDc3MjEgMi42Nzc5NTggNC43MTQzMjEgMi43MDU4NTMgNC45MjM1MzcgMi43MDU4NTNDNS4wMDcyMjMgMi43MDU4NTMgNS4xNzQ1OTUgMi43MDU4NTMgNS4xNzQ1OTUgMi40NDA4NDdDNS4xNzQ1OTUgMi4zMDEzNyA1LjA2MzAxNCAyLjMwMTM3IDQuODUzNzk4IDIuMzAxMzdDNC4xOTgyNTcgMi4zMDEzNyA0LjE1NjQxMyAyLjIwMzczNiA0LjE1NjQxMyAyLjA5MjE1NEM0LjE1NjQxMyAyLjAyMjQxNiA0LjE3MDM2MSAyLjAwODQ2OCA0LjIxMjIwNCAxLjgyNzE0OEw2LjE1MDkzNC02LjAxMTQ1N1pNNC4xODQzMDktMS42NTk3NzZDNC4xMTQ1Ny0xLjQyMjY2NSA0LjExNDU3LTEuMzk0NzcgMy45MTkzMDMtMS4xMjk3NjNDMy42MTI0NTMtLjczOTIyOCAyLjk5ODc1NS0uMTM5NDc3IDIuMzQzMjEzLS4xMzk0NzdDMS43NzEzNTctLjEzOTQ3NyAxLjQ1MDU2LS42NTU1NDIgMS40NTA1Ni0xLjQ3ODQ1NkMxLjQ1MDU2LTIuMjQ1NTc5IDEuODgyOTM5LTMuODA3NzIxIDIuMTQ3OTQ1LTQuMzkzNTI0QzIuNjIyMTY3LTUuMzY5ODYzIDMuMjc3NzA5LTUuODcxOTggMy44MjE2NjktNS44NzE5OEM0Ljc0MjIxNy01Ljg3MTk4IDQuOTIzNTM3LTQuNzI4MjY5IDQuOTIzNTM3LTQuNjE2Njg3QzQuOTIzNTM3LTQuNjAyNzQgNC44ODE2OTQtNC40MjE0MiA0Ljg2Nzc0Ni00LjM5MzUyNEw0LjE4NDMwOS0xLjY1OTc3NlonLz4KPHBhdGggaWQ9J2cwLTExNycgZD0nTTQuMjc2MzQ1LS43MDI5NjFWLjA1ODU4TDYuMDA0NDU3IDBWLS40NTg4NzdDNS4zOTkxMy0uNDU4ODc3IDUuMzMwNzg2LS40NTg4NzcgNS4zMzA3ODYtLjgzOTY0OFYtNC4zOTM1MDVMMy41NDQwOTQtNC4zMTUzOThWLTMuODU2NTIxQzQuMTQ5NDIyLTMuODU2NTIxIDQuMjE3NzY1LTMuODU2NTIxIDQuMjE3NzY1LTMuNDc1NzUxVi0xLjYxMDk1MkM0LjIxNzc2NS0uODEwMzU4IDMuNzE5ODM0LS4yOTI5IDMuMDA3MTEtLjI5MjlDMi4yNTUzMzMtLjI5MjkgMi4yMjYwNDMtLjUzNjk4NCAyLjIyNjA0My0xLjA2NDIwNVYtNC4zOTM1MDVMLjQzOTM1MS00LjMxNTM5OFYtMy44NTY1MjFDMS4wNDQ2NzgtMy44NTY1MjEgMS4xMTMwMjEtMy44NTY1MjEgMS4xMTMwMjEtMy40NzU3NTFWLTEuMjAwODkxQzEuMTEzMDIxLS4xNTYyMTQgMS45MDM4NTIgLjA1ODU4IDIuODcwNDIzIC4wNTg1OEMzLjEyNDI3IC4wNTg1OCAzLjgyNzIzMSAuMDU4NTggNC4yNzYzNDUtLjcwMjk2MVonLz4KPHBhdGggaWQ9J2c2LTExJyBkPSdNNi4xMDkwOTEtNS42MDY5NzRINy42OTkxMjhWLTYuMDExNDU3SDYuMDgxMTk2Vi03LjY0MzMzN0M2LjA4MTE5Ni04Ljg0MjgzOSA2LjY5NDg5NC05LjU0MDIyNCA3LjMwODU5My05LjU0MDIyNEM3LjUxNzgwOC05LjU0MDIyNCA3LjcxMzA3Ni05LjQ3MDQ4NiA3Ljc5Njc2Mi05LjQyODY0M0M3Ljc0MDk3MS05LjQxNDY5NSA3LjM5MjI3OS05LjI4OTE2NiA3LjM5MjI3OS04Ljg4NDY4MkM3LjM5MjI3OS04LjU2Mzg4NSA3LjYxNTQ0Mi04LjM0MDcyMiA3LjkzNjIzOS04LjM0MDcyMkM4LjI3MDk4NC04LjM0MDcyMiA4LjQ5NDE0Ny04LjU2Mzg4NSA4LjQ5NDE0Ny04Ljg5ODYzQzguNDk0MTQ3LTkuNDAwNzQ3IDguMDA1OTc4LTkuODE5MTc4IDcuMzA4NTkzLTkuODE5MTc4QzYuNzUwNjg1LTkuODE5MTc4IDYuMjIwNjcyLTkuNTY4MTIgNS44NzE5OC05LjIzMzM3NUM1LjUwOTM0LTkuNzQ5NDQgNC43MjgyNjktOS44MTkxNzggNC4zNTE2ODEtOS44MTkxNzhDMy4wMTI3MDItOS44MTkxNzggMS40NTA1Ni05LjA5Mzg5OCAxLjQ1MDU2LTcuNjE1NDQyVi02LjAxMTQ1N0guMzYyNjRWLTUuNjA2OTc0SDEuNDUwNTZWLTEuMDMyMTNDMS40NTA1Ni0uNDA0NDgzIDEuMjk3MTM2LS40MDQ0ODMgLjM5MDUzNS0uNDA0NDgzVjBDLjc4MTA3MS0uMDI3ODk1IDEuNDY0NTA4LS4wMjc4OTUgMS44ODI5MzktLjAyNzg5NVMyLjk5ODc1NS0uMDI3ODk1IDMuMzg5MjkgMFYtLjQwNDQ4M0MyLjQ5NjYzOC0uNDA0NDgzIDIuMzI5MjY1LS40MDQ0ODMgMi4zMjkyNjUtMS4wMzIxM1YtNS42MDY5NzRINS4yMzAzODZWLTEuMDMyMTNDNS4yMzAzODYtLjQwNDQ4MyA1LjA3Njk2MS0uNDA0NDgzIDQuMTcwMzYxLS40MDQ0ODNWMEM0LjU2MDg5Ny0uMDI3ODk1IDUuMzI4MDItLjAyNzg5NSA1Ljc0NjQ1MS0uMDI3ODk1QzYuMTIzMDM5LS4wMjc4OTUgNy4xMTMzMjUtLjAyNzg5NSA3LjQzNDEyMiAwVi0uNDA0NDgzSDcuMTU1MTY4QzYuMTM2OTg2LS40MDQ0ODMgNi4xMDkwOTEtLjU1NzkwOCA2LjEwOTA5MS0xLjA2MDAyNVYtNS42MDY5NzRaTTIuMzAxMzctNi4wMTE0NTdWLTcuNTg3NTQ3QzIuMzAxMzctOS4wMTAyMTIgMy40ODY5MjQtOS41NDAyMjQgNC4zMjM3ODYtOS41NDAyMjRDNC40MjE0Mi05LjU0MDIyNCA1LjAzNTExOC05LjU0MDIyNCA1LjQzOTYwMS05LjI0NzMyM0M1LjA2MzAxNC05LjE3NzU4NCA0Ljk1MTQzMi04LjkxMjU3OCA0Ljk1MTQzMi04LjcwMzM2MkM0Ljk1MTQzMi04LjQ2NjI1MiA1LjA3Njk2MS04LjI3MDk4NCA1LjI4NjE3Ny04LjE4NzI5OEM1LjIzMDM4Ni03Ljk3ODA4MiA1LjIzMDM4Ni03Ljc5Njc2MiA1LjIzMDM4Ni03LjY0MzMzN1YtNi4wMTE0NTdIMi4zMDEzN1onLz4KPHBhdGggaWQ9J2c2LTQwJyBkPSdNNC41MzMwMDEgMy4zODkyOUM0LjUzMzAwMSAzLjM0NzQ0NyA0LjUzMzAwMSAzLjMxOTU1MiA0LjI5NTg5IDMuMDgyNDQxQzIuOTAxMTIxIDEuNjczNzI0IDIuMTIwMDUtLjYyNzY0NiAyLjEyMDA1LTMuNDcyOTc2QzIuMTIwMDUtNi4xNzg4MjkgMi43NzU1OTItOC41MDgwOTUgNC4zOTM1MjQtMTAuMTUzOTIzQzQuNTMzMDAxLTEwLjI3OTQ1MiA0LjUzMzAwMS0xMC4zMDczNDcgNC41MzMwMDEtMTAuMzQ5MTkxQzQuNTMzMDAxLTEwLjQzMjg3NyA0LjQ2MzI2My0xMC40NjA3NzIgNC40MDc0NzItMTAuNDYwNzcyQzQuMjI2MTUyLTEwLjQ2MDc3MiAzLjA4MjQ0MS05LjQ1NjUzOCAyLjM5OTAwNC04LjA4OTY2NEMxLjY4NzY3MS02LjY4MDk0NiAxLjM2Njg3NC01LjE4ODU0MyAxLjM2Njg3NC0zLjQ3Mjk3NkMxLjM2Njg3NC0yLjIzMTYzMSAxLjU2MjE0Mi0uNTcxODU2IDIuMjg3NDIyIC45MjA1NDhDMy4xMTAzMzYgMi41OTQyNzEgNC4yNTQwNDcgMy41MDA4NzIgNC40MDc0NzIgMy41MDA4NzJDNC40NjMyNjMgMy41MDA4NzIgNC41MzMwMDEgMy40NzI5NzYgNC41MzMwMDEgMy4zODkyOVonLz4KPHBhdGggaWQ9J2c2LTQxJyBkPSdNMy45MzMyNS0zLjQ3Mjk3NkMzLjkzMzI1LTQuNTMzMDAxIDMuNzkzNzczLTYuMjYyNTE2IDMuMDEyNzAyLTcuODgwNDQ4QzIuMTg5Nzg4LTkuNTU0MTcyIDEuMDQ2MDc3LTEwLjQ2MDc3MiAuODkyNjUzLTEwLjQ2MDc3MkMuODM2ODYyLTEwLjQ2MDc3MiAuNzY3MTIzLTEwLjQzMjg3NyAuNzY3MTIzLTEwLjM0OTE5MUMuNzY3MTIzLTEwLjMwNzM0NyAuNzY3MTIzLTEwLjI3OTQ1MiAxLjAwNDIzNC0xMC4wNDIzNDFDMi4zOTkwMDQtOC42MzM2MjQgMy4xODAwNzUtNi4zMzIyNTQgMy4xODAwNzUtMy40ODY5MjRDMy4xODAwNzUtLjc4MTA3MSAyLjUyNDUzMyAxLjU0ODE5NCAuOTA2NiAzLjE5NDAyMkMuNzY3MTIzIDMuMzE5NTUyIC43NjcxMjMgMy4zNDc0NDcgLjc2NzEyMyAzLjM4OTI5Qy43NjcxMjMgMy40NzI5NzYgLjgzNjg2MiAzLjUwMDg3MiAuODkyNjUzIDMuNTAwODcyQzEuMDczOTczIDMuNTAwODcyIDIuMjE3Njg0IDIuNDk2NjM4IDIuOTAxMTIxIDEuMTI5NzYzQzMuNjEyNDUzLS4yOTI5MDIgMy45MzMyNS0xLjc5OTI1MyAzLjkzMzI1LTMuNDcyOTc2WicvPgo8cGF0aCBpZD0nZzYtNDMnIGQ9J001LjU2NTEzMS0zLjIyMTkxOEg5LjQxNDY5NUM5LjYwOTk2My0zLjIyMTkxOCA5Ljg2MTAyMS0zLjIyMTkxOCA5Ljg2MTAyMS0zLjQ3Mjk3NkM5Ljg2MTAyMS0zLjczNzk4MyA5LjYyMzkxLTMuNzM3OTgzIDkuNDE0Njk1LTMuNzM3OTgzSDUuNTY1MTMxVi03LjU4NzU0N0M1LjU2NTEzMS03Ljc4MjgxNCA1LjU2NTEzMS04LjAzMzg3MyA1LjMxNDA3Mi04LjAzMzg3M0M1LjA0OTA2Ni04LjAzMzg3MyA1LjA0OTA2Ni03Ljc5Njc2MiA1LjA0OTA2Ni03LjU4NzU0N1YtMy43Mzc5ODNIMS4xOTk1MDJDMS4wMDQyMzQtMy43Mzc5ODMgLjc1MzE3Ni0zLjczNzk4MyAuNzUzMTc2LTMuNDg2OTI0Qy43NTMxNzYtMy4yMjE5MTggLjk5MDI4Ni0zLjIyMTkxOCAxLjE5OTUwMi0zLjIyMTkxOEg1LjA0OTA2NlYuNjI3NjQ2QzUuMDQ5MDY2IC44MjI5MTQgNS4wNDkwNjYgMS4wNzM5NzMgNS4zMDAxMjUgMS4wNzM5NzNDNS41NjUxMzEgMS4wNzM5NzMgNS41NjUxMzEgLjgzNjg2MiA1LjU2NTEzMSAuNjI3NjQ2Vi0zLjIyMTkxOFonLz4KPHBhdGggaWQ9J2c2LTYxJyBkPSdNOS40MTQ2OTUtNC41MTkwNTRDOS42MDk5NjMtNC41MTkwNTQgOS44NjEwMjEtNC41MTkwNTQgOS44NjEwMjEtNC43NzAxMTJDOS44NjEwMjEtNS4wMzUxMTggOS42MjM5MS01LjAzNTExOCA5LjQxNDY5NS01LjAzNTExOEgxLjE5OTUwMkMxLjAwNDIzNC01LjAzNTExOCAuNzUzMTc2LTUuMDM1MTE4IC43NTMxNzYtNC43ODQwNkMuNzUzMTc2LTQuNTE5MDU0IC45OTAyODYtNC41MTkwNTQgMS4xOTk1MDItNC41MTkwNTRIOS40MTQ2OTVaTTkuNDE0Njk1LTEuOTI0NzgyQzkuNjA5OTYzLTEuOTI0NzgyIDkuODYxMDIxLTEuOTI0NzgyIDkuODYxMDIxLTIuMTc1ODQxQzkuODYxMDIxLTIuNDQwODQ3IDkuNjIzOTEtMi40NDA4NDcgOS40MTQ2OTUtMi40NDA4NDdIMS4xOTk1MDJDMS4wMDQyMzQtMi40NDA4NDcgLjc1MzE3Ni0yLjQ0MDg0NyAuNzUzMTc2LTIuMTg5Nzg4Qy43NTMxNzYtMS45MjQ3ODIgLjk5MDI4Ni0xLjkyNDc4MiAxLjE5OTUwMi0xLjkyNDc4Mkg5LjQxNDY5NVonLz4KPHBhdGggaWQ9J2c2LTY1JyBkPSdNNS4zOTc3NTgtOS43MDc1OTdDNS4zNDE5NjgtOS44NzQ5NjkgNS4zMTQwNzItOS45NTg2NTUgNS4xMTg4MDQtOS45NTg2NTVTNC44OTU2NDEtOS45MTY4MTIgNC44MjU5MDMtOS42OTM2NDlMMS45MTA4MzQtMS4zNTI5MjdDMS43MTU1NjctLjc4MTA3MSAxLjMyNTAzMS0uNDE4NDMxIC40MzIzNzktLjQwNDQ4M1YwQzEuMjgzMTg4LS4wMjc4OTUgMS4zMTEwODMtLjAyNzg5NSAxLjc3MTM1Ny0uMDI3ODk1QzIuMTYxODkzLS4wMjc4OTUgMi44MzEzODItLjAyNzg5NSAzLjE5NDAyMiAwVi0uNDA0NDgzQzIuNjA4MjE5LS40MTg0MzEgMi4yNTk1MjctLjcxMTMzMyAyLjI1OTUyNy0xLjEwMTg2OEMyLjI1OTUyNy0xLjE4NTU1NCAyLjI1OTUyNy0xLjIxMzQ1IDIuMzI5MjY1LTEuMzk0NzdMMi45NzA4NTktMy4yNDk4MTNINi40ODU2NzlMNy4yNTI4MDItMS4wNjAwMjVDNy4zMjI1NC0uODkyNjUzIDcuMzIyNTQtLjg2NDc1NyA3LjMyMjU0LS44MjI5MTRDNy4zMjI1NC0uNDA0NDgzIDYuNjExMjA4LS40MDQ0ODMgNi4yNjI1MTYtLjQwNDQ4M1YwQzYuNTgzMzEzLS4wMjc4OTUgNy42ODUxODEtLjAyNzg5NSA4LjA3NTcxNi0uMDI3ODk1UzkuNDcwNDg2LS4wMjc4OTUgOS43OTEyODMgMFYtLjQwNDQ4M0M4Ljg4NDY4Mi0uNDA0NDgzIDguNjMzNjI0LS40MDQ0ODMgOC40MzgzNTYtLjk3NjMzOUw1LjM5Nzc1OC05LjcwNzU5N1pNNC43MjgyNjktOC4yOTg4NzlMNi4zNDYyMDItMy42NTQyOTZIMy4xMTAzMzZMNC43MjgyNjktOC4yOTg4NzlaJy8+CjxwYXRoIGlkPSdnNi02OCcgZD0nTS41ODU4MDMtOS41MjYyNzZWLTkuMTIxNzkzSC44NjQ3NTdDMS44Njg5OTEtOS4xMjE3OTMgMS45MTA4MzQtOC45ODIzMTYgMS45MTA4MzQtOC40NjYyNTJWLTEuMDYwMDI1QzEuOTEwODM0LS41NDM5NiAxLjg2ODk5MS0uNDA0NDgzIC44NjQ3NTctLjQwNDQ4M0guNTg1ODAzVjBINS40Njc0OTdDNy43OTY3NjIgMCA5LjY2NTc1My0yLjA5MjE1NCA5LjY2NTc1My00LjY3MjQ3OEM5LjY2NTc1My03LjM2NDM4NCA3Ljc4MjgxNC05LjUyNjI3NiA1LjQ2NzQ5Ny05LjUyNjI3NkguNTg1ODAzWk0zLjY1NDI5Ni0uNDA0NDgzQzMuMDQwNTk4LS40MDQ0ODMgMy4wMTI3MDItLjUwMjExNyAzLjAxMjcwMi0uOTYyMzkxVi04LjU2Mzg4NUMzLjAxMjcwMi05LjAyNDE1OSAzLjA0MDU5OC05LjEyMTc5MyAzLjY1NDI5Ni05LjEyMTc5M0g1LjExODgwNEM2LjI3NjQ2My05LjEyMTc5MyA3LjE5NzAxMS04LjU2Mzg4NSA3Ljc2ODg2Ny03LjY0MzMzN0M4LjM5NjUxMy02LjY1MzA1MSA4LjM5NjUxMy01LjI0NDMzNCA4LjM5NjUxMy00LjY4NjQyNkM4LjM5NjUxMy0zLjkwNTM1NSA4LjM4MjU2NS0yLjU5NDI3MSA3LjU4NzU0Ny0xLjU2MjE0MkM3LjEyNzI3My0uOTc2MzM5IDYuMjkwNDExLS40MDQ0ODMgNS4xMTg4MDQtLjQwNDQ4M0gzLjY1NDI5NlonLz4KPHBhdGggaWQ9J2c2LTg0JyBkPSdNOS4xMDc4NDYtOS40NTY1MzhILjczOTIyOEwuNDg4MTY5LTYuMzQ2MjAySC43OTUwMTlDLjk5MDI4Ni04LjU0OTkzOCAxLjExNTgxNi05LjA1MjA1NSAzLjMxOTU1Mi05LjA1MjA1NUMzLjU3MDYxLTkuMDUyMDU1IDMuOTYxMTQ2LTkuMDUyMDU1IDQuMDcyNzI3LTkuMDI0MTU5QzQuMzUxNjgxLTguOTgyMzE2IDQuMzY1NjI5LTguODE0OTQ0IDQuMzY1NjI5LTguNDk0MTQ3Vi0xLjA3Mzk3M0M0LjM2NTYyOS0uNTk5NzUxIDQuMzY1NjI5LS40MDQ0ODMgMi45OTg3NTUtLjQwNDQ4M0gyLjQ5NjYzOFYwQzIuOTQyOTY0LS4wMjc4OTUgNC4zNzk1NzctLjAyNzg5NSA0LjkyMzUzNy0uMDI3ODk1UzYuOTE4MDU3LS4wMjc4OTUgNy4zNjQzODQgMFYtLjQwNDQ4M0g2Ljg2MjI2N0M1LjQ5NTM5Mi0uNDA0NDgzIDUuNDk1MzkyLS41OTk3NTEgNS40OTUzOTItMS4wNzM5NzNWLTguNDk0MTQ3QzUuNDk1MzkyLTguODQyODM5IDUuNTIzMjg4LTguOTY4MzY5IDUuNzQ2NDUxLTkuMDI0MTU5QzUuODU4MDMyLTkuMDUyMDU1IDYuMjYyNTE2LTkuMDUyMDU1IDYuNTI3NTIyLTkuMDUyMDU1QzguNzMxMjU4LTkuMDUyMDU1IDguODU2Nzg3LTguNTQ5OTM4IDkuMDUyMDU1LTYuMzQ2MjAySDkuMzU4OTA0TDkuMTA3ODQ2LTkuNDU2NTM4WicvPgo8cGF0aCBpZD0nZzYtMTAwJyBkPSdNNC4xODQzMDktOS41MjYyNzZWLTkuMTIxNzkzQzUuMTMyNzUyLTkuMTIxNzkzIDUuMjQ0MzM0LTkuMDI0MTU5IDUuMjQ0MzM0LTguMzQwNzIyVi01LjI1ODI4MUM0Ljk1MTQzMi01LjY2Mjc2NSA0LjM1MTY4MS02LjE1MDkzNCAzLjUwMDg3Mi02LjE1MDkzNEMxLjg4MjkzOS02LjE1MDkzNCAuNDg4MTY5LTQuNzg0MDYgLjQ4ODE2OS0yLjk5ODc1NUMuNDg4MTY5LTEuMjI3Mzk3IDEuODEzMiAuMTM5NDc3IDMuMzQ3NDQ3IC4xMzk0NzdDNC40MDc0NzIgLjEzOTQ3NyA1LjAyMTE3MS0uNTU3OTA4IDUuMjE2NDM4LS44MjI5MTRWLjEzOTQ3N0w3LjE4MzA2NCAwVi0uNDA0NDgzQzYuMjM0NjItLjQwNDQ4MyA2LjEyMzAzOS0uNTAyMTE3IDYuMTIzMDM5LTEuMTg1NTU0Vi05LjY3OTcwMUw0LjE4NDMwOS05LjUyNjI3NlpNNS4yMTY0MzgtMS42MzE4OEM1LjIxNjQzOC0xLjM4MDgyMiA1LjIxNjQzOC0xLjMzODk3OSA1LjAyMTE3MS0xLjAzMjEzQzQuNjg2NDI2LS41NDM5NiA0LjExNDU3LS4xMzk0NzcgMy40MTcxODYtLjEzOTQ3N0MzLjA1NDU0NS0uMTM5NDc3IDEuNTQ4MTk0LS4yNzg5NTQgMS41NDgxOTQtMi45ODQ4MDdDMS41NDgxOTQtMy45ODkwNDEgMS43MTU1NjctNC41NDY5NDkgMi4wMjI0MTYtNS4wMDcyMjNDMi4zMDEzNy01LjQzOTYwMSAyLjg1OTI3OC01Ljg3MTk4IDMuNTU2NjYzLTUuODcxOThDNC40MjE0Mi01Ljg3MTk4IDQuOTA5NTg5LTUuMjQ0MzM0IDUuMDQ5MDY2LTUuMDIxMTcxQzUuMjE2NDM4LTQuNzg0MDYgNS4yMTY0MzgtNC43NTYxNjQgNS4yMTY0MzgtNC41MDUxMDZWLTEuNjMxODhaJy8+CjxwYXRoIGlkPSdnNi0xMDEnIGQ9J001LjM0MTk2OC0zLjIzNTg2NkM1LjY0ODgxNy0zLjIzNTg2NiA1LjY3NjcxMi0zLjIzNTg2NiA1LjY3NjcxMi0zLjUwMDg3MkM1LjY3NjcxMi00LjkwOTU4OSA0LjkyMzUzNy02LjIyMDY3MiAzLjIzNTg2Ni02LjIyMDY3MkMxLjY0NTgyOC02LjIyMDY3MiAuNDE4NDMxLTQuNzg0MDYgLjQxODQzMS0zLjA1NDU0NUMuNDE4NDMxLTEuMjEzNDUgMS44NDEwOTYgLjEzOTQ3NyAzLjM4OTI5IC4xMzk0NzdDNS4wNDkwNjYgLjEzOTQ3NyA1LjY3NjcxMi0xLjM2Njg3NCA1LjY3NjcxMi0xLjY1OTc3NkM1LjY3NjcxMi0xLjc0MzQ2MiA1LjYwNjk3NC0xLjc5OTI1MyA1LjUyMzI4OC0xLjc5OTI1M0M1LjQxMTcwNi0xLjc5OTI1MyA1LjM4MzgxMS0xLjcyOTUxNCA1LjM1NTkxNS0xLjY1OTc3NkM0Ljk5MzI3NS0uNDg4MTY5IDQuMDU4NzgtLjE2NzM3MiAzLjQ3Mjk3Ni0uMTY3MzcyUzEuNDc4NDU2LS41NTc5MDggMS40Nzg0NTYtMi45NzA4NTlWLTMuMjM1ODY2SDUuMzQxOTY4Wk0xLjQ5MjQwMy0zLjUwMDg3MkMxLjYwMzk4NS01LjY5MDY2IDIuODMxMzgyLTUuOTQxNzE5IDMuMjIxOTE4LTUuOTQxNzE5QzQuNzE0MzIxLTUuOTQxNzE5IDQuNzk4MDA3LTMuOTc1MDkzIDQuODExOTU1LTMuNTAwODcySDEuNDkyNDAzWicvPgo8cGF0aCBpZD0nZzYtMTA1JyBkPSdNMi40MjY4OTktOC41OTE3ODFDMi40MjY4OTktOC45NTQ0MjEgMi4xMzM5OTgtOS4yNzUyMTggMS43NDM0NjItOS4yNzUyMThDMS4zODA4MjItOS4yNzUyMTggMS4wNzM5NzMtOC45ODIzMTYgMS4wNzM5NzMtOC42MDU3MjlDMS4wNzM5NzMtOC4xODcyOTggMS40MDg3MTctNy45MjIyOTEgMS43NDM0NjItNy45MjIyOTFDMi4xNzU4NDEtNy45MjIyOTEgMi40MjY4OTktOC4yODQ5MzIgMi40MjY4OTktOC41OTE3ODFaTS41MDIxMTctNS45OTc1MDlWLTUuNTkzMDI2QzEuMzk0NzctNS41OTMwMjYgMS41MjAyOTktNS41MDkzNCAxLjUyMDI5OS00LjgyNTkwM1YtMS4wMzIxM0MxLjUyMDI5OS0uNDA0NDgzIDEuMzY2ODc0LS40MDQ0ODMgLjQ2MDI3NC0uNDA0NDgzVjBDLjg1MDgwOS0uMDI3ODk1IDEuNTIwMjk5LS4wMjc4OTUgMS45MjQ3ODItLjAyNzg5NUMyLjA3ODIwNy0uMDI3ODk1IDIuODg3MTczLS4wMjc4OTUgMy4zNjEzOTUgMFYtLjQwNDQ4M0MyLjQ1NDc5NS0uNDA0NDgzIDIuMzk5MDA0LS40NzQyMjIgMi4zOTkwMDQtMS4wMTgxODJWLTYuMTUwOTM0TC41MDIxMTctNS45OTc1MDlaJy8+CjxwYXRoIGlkPSdnNi0xMDknIGQ9J00xMC4wMDA0OTgtMy4zODkyOUMxMC4wMDA0OTgtNC42ODY0MjYgMTAuMDAwNDk4LTUuMDc2OTYxIDkuNjc5NzAxLTUuNTIzMjg4QzkuMjc1MjE4LTYuMDY3MjQ4IDguNjE5Njc2LTYuMTUwOTM0IDguMTQ1NDU1LTYuMTUwOTM0QzYuOTg3Nzk2LTYuMTUwOTM0IDYuNDAxOTkzLTUuMzE0MDcyIDYuMTc4ODI5LTQuNzcwMTEyQzUuOTgzNTYyLTUuODQ0MDg1IDUuMjMwMzg2LTYuMTUwOTM0IDQuMzUxNjgxLTYuMTUwOTM0QzIuOTk4NzU1LTYuMTUwOTM0IDIuNDY4NzQyLTQuOTkzMjc1IDIuMzU3MTYxLTQuNzE0MzIxSDIuMzQzMjEzVi02LjE1MDkzNEwuNDQ2MzI2LTUuOTk3NTA5Vi01LjU5MzAyNkMxLjM5NDc3LTUuNTkzMDI2IDEuNTA2MzUxLTUuNDk1MzkyIDEuNTA2MzUxLTQuODExOTU1Vi0xLjAzMjEzQzEuNTA2MzUxLS40MDQ0ODMgMS4zNTI5MjctLjQwNDQ4MyAuNDQ2MzI2LS40MDQ0ODNWMEMuODA4OTY2LS4wMjc4OTUgMS41NjIxNDItLjAyNzg5NSAxLjk1MjY3Ny0uMDI3ODk1QzIuMzU3MTYxLS4wMjc4OTUgMy4xMTAzMzYtLjAyNzg5NSAzLjQ3Mjk3NiAwVi0uNDA0NDgzQzIuNTgwMzI0LS40MDQ0ODMgMi40MTI5NTEtLjQwNDQ4MyAyLjQxMjk1MS0xLjAzMjEzVi0zLjYyNjQwMUMyLjQxMjk1MS01LjA5MDkwOSAzLjM3NTM0Mi01Ljg3MTk4IDQuMjQwMS01Ljg3MTk4UzUuMzAwMTI1LTUuMTYwNjQ4IDUuMzAwMTI1LTQuMzA5ODM4Vi0xLjAzMjEzQzUuMzAwMTI1LS40MDQ0ODMgNS4xNDY3LS40MDQ0ODMgNC4yNDAxLS40MDQ0ODNWMEM0LjYwMjc0LS4wMjc4OTUgNS4zNTU5MTUtLjAyNzg5NSA1Ljc0NjQ1MS0uMDI3ODk1QzYuMTUwOTM0LS4wMjc4OTUgNi45MDQxMS0uMDI3ODk1IDcuMjY2NzUgMFYtLjQwNDQ4M0M2LjM3NDA5Ny0uNDA0NDgzIDYuMjA2NzI1LS40MDQ0ODMgNi4yMDY3MjUtMS4wMzIxM1YtMy42MjY0MDFDNi4yMDY3MjUtNS4wOTA5MDkgNy4xNjkxMTYtNS44NzE5OCA4LjAzMzg3My01Ljg3MTk4UzkuMDkzODk4LTUuMTYwNjQ4IDkuMDkzODk4LTQuMzA5ODM4Vi0xLjAzMjEzQzkuMDkzODk4LS40MDQ0ODMgOC45NDA0NzMtLjQwNDQ4MyA4LjAzMzg3My0uNDA0NDgzVjBDOC4zOTY1MTMtLjAyNzg5NSA5LjE0OTY4OS0uMDI3ODk1IDkuNTQwMjI0LS4wMjc4OTVDOS45NDQ3MDctLjAyNzg5NSAxMC42OTc4ODMtLjAyNzg5NSAxMS4wNjA1MjMgMFYtLjQwNDQ4M0MxMC4zNjMxMzgtLjQwNDQ4MyAxMC4wMTQ0NDYtLjQwNDQ4MyAxMC4wMDA0OTgtLjgyMjkxNFYtMy4zODkyOVonLz4KPHBhdGggaWQ9J2c2LTExOCcgZD0nTTUuNjkwNjYtNC42ODY0MjZDNS44MTYxODktNC45OTMyNzUgNi4wNTMzLTUuNTkzMDI2IDYuOTQ1OTUzLTUuNjA2OTc0Vi02LjAxMTQ1N0M2LjU0MTQ2OS01Ljk4MzU2MiA2LjM0NjIwMi01Ljk4MzU2MiA1LjkxMzgyMy01Ljk4MzU2MkM1LjYyMDkyMi01Ljk4MzU2MiA1LjQxMTcwNi01Ljk4MzU2MiA0Ljc3MDExMi02LjAxMTQ1N1YtNS42MDY5NzRDNS4zNTU5MTUtNS41NzkwNzggNS40MjU2NTQtNS4xNjA2NDggNS40MjU2NTQtNS4wMDcyMjNDNS40MjU2NTQtNC44ODE2OTQgNS4zOTc3NTgtNC44MTE5NTUgNS4zMjgwMi00LjY0NDU4M0wzLjkwNTM1NS0xLjA0NjA3N0wyLjM0MzIxMy00Ljk3OTMyOEMyLjI3MzQ3NC01LjE3NDU5NSAyLjI1OTUyNy01LjE3NDU5NSAyLjI1OTUyNy01LjI0NDMzNEMyLjI1OTUyNy01LjYwNjk3NCAyLjc4OTUzOS01LjYwNjk3NCAzLjA0MDU5OC01LjYwNjk3NFYtNi4wMTE0NTdDMi42OTE5MDUtNS45ODM1NjIgMS45NjY2MjUtNS45ODM1NjIgMS41OTAwMzctNS45ODM1NjJDMS4xMjk3NjMtNS45ODM1NjIgMS4xMDE4NjgtNS45ODM1NjIgLjI1MTA1OS02LjAxMTQ1N1YtNS42MDY5NzRDMS4wMzIxMy01LjYwNjk3NCAxLjE3MTYwNi01LjU1MTE4MyAxLjMzODk3OS01LjExODgwNEwzLjMzMzQ5OS0uMTI1NTI5QzMuNDAzMjM4IC4wNjk3MzggMy40MzExMzMgLjEzOTQ3NyAzLjU5ODUwNiAuMTM5NDc3QzMuNjk2MTM5IC4xMzk0NzcgMy43Nzk4MjYgLjExMTU4MiAzLjg3NzQ2LS4xMjU1MjlMNS42OTA2Ni00LjY4NjQyNlonLz4KPHBhdGggaWQ9J2cxLTEwNCcgZD0nTTMuMTUyMTc5IDI0LjUzMzk5OEg2LjMxODMwNlYyMy44Nzg0NTZIMy44MDc3MjFWLjA5NzYzNEg2LjMxODMwNlYtLjU1NzkwOEgzLjE1MjE3OVYyNC41MzM5OThaJy8+CjxwYXRoIGlkPSdnMS0xMDUnIGQ9J00yLjc2MTY0NCAyMy44Nzg0NTZILjI1MTA1OVYyNC41MzM5OThIMy40MTcxODZWLS41NTc5MDhILjI1MTA1OVYuMDk3NjM0SDIuNzYxNjQ0VjIzLjg3ODQ1NlonLz4KPHBhdGggaWQ9J2czLTI2JyBkPSdNLjMyMjE5IDEuNjg5MDU5Qy4yOTI5IDEuODA2MjE5IC4yOTI5IDEuODI1NzQ1IC4yOTI5IDEuODQ1MjcyQy4yOTI5IDEuOTkxNzIyIC40MDAyOTcgMi4xMDg4ODIgLjU2NjI3NCAyLjEwODg4MkMuNzcxMzA0IDIuMTA4ODgyIC44ODg0NjQgMS45MzMxNDIgLjkwNzk5MSAxLjkwMzg1MkMuOTU2ODA4IDEuODE1OTgyIDEuMjY5MjM1IC41MDc2OTQgMS41MzI4NDUtLjU0Njc0N0MxLjcyODExMi0uMTU2MjE0IDIuMDQwNTM5IC4xMDczOTcgMi40OTk0MTYgLjEwNzM5N0MzLjY0MTcyOCAuMTA3Mzk3IDQuOTAxMTk5LTEuMjY5MjM1IDQuOTAxMTk5LTIuNzIzOTczQzQuOTAxMTk5LTMuNzU4ODg4IDQuMjU2ODE4LTQuMzE1Mzk4IDMuNTQ0MDk0LTQuMzE1Mzk4QzIuNTk3MDUtNC4zMTUzOTggMS41NzE4OTktMy4zMzkwNjQgMS4yNzg5OTgtMi4xNDc5MzZMLjMyMjE5IDEuNjg5MDU5Wk0yLjQ4OTY1My0uMTA3Mzk3QzEuODA2MjE5LS4xMDczOTcgMS42NTAwMDUtLjg4ODQ2NCAxLjY1MDAwNS0uOTc2MzM0QzEuNjUwMDA1LTEuMDE1Mzg4IDEuNjk4ODIyLTEuMjEwNjU1IDEuNzI4MTEyLTEuMzM3NTc4QzIuMDAxNDg2LTIuNDMxMDczIDIuMDk5MTE5LTIuNzgyNTUzIDIuMzEzOTEzLTMuMTczMDg3QzIuNzMzNzM3LTMuODg1ODExIDMuMjIxOTA0LTQuMTAwNjA1IDMuNTI0NTY3LTQuMTAwNjA1QzMuODg1ODExLTQuMTAwNjA1IDQuMTk4MjM4LTMuODE3NDY4IDQuMTk4MjM4LTMuMTQzNzk3QzQuMTk4MjM4LTIuNjA2ODEzIDMuOTE1MTAxLTEuNTEzMzE4IDMuNjUxNDkxLTEuMDM0OTE1QzMuMzI5MzAxLS40MTk4MjQgMi44NjA2Ni0uMTA3Mzk3IDIuNDg5NjUzLS4xMDczOTdaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSc3Ni4wMTE2NzknIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzQtODInLz4KPHVzZSB4PSc5MC4zOTU5NCcgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi02MScvPgo8dXNlIHg9JzEwNC44OTIzNTknIHk9Jy0yNC41NDgyMDMnIHhsaW5rOmhyZWY9JyNnMS0xMDQnLz4KPHVzZSB4PScxMTEuNDc4NzknIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxMTYuNzg5ODM3JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTg0Jy8+Cjx1c2UgeD0nMTI2LjY1MzIwOScgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi0xMDUnLz4KPHVzZSB4PScxMzAuNDQ2ODE0JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTEwOScvPgo8dXNlIHg9JzE0MS44Mjc2MjgnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtMTAxJy8+Cjx1c2UgeD0nMTQ3Ljg5NzM5NicgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi00MScvPgo8dXNlIHg9JzE1My4yMDg0NDMnIHk9Jy01LjA5MTA0NycgeGxpbms6aHJlZj0nI2czLTI2Jy8+Cjx1c2UgeD0nMTYxLjg1MzgzMycgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi00MycvPgo8dXNlIHg9JzE3NS41NzUzODcnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtNDAnLz4KPHVzZSB4PScxODAuODg2NDM0JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTY1Jy8+Cjx1c2UgeD0nMTkxLjEyNDMzOScgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi0xMDAnLz4KPHVzZSB4PScxOTguNzExNTQ4JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTExOCcvPgo8dXNlIHg9JzIwNi4xMDkwNycgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNC01OCcvPgo8dXNlIHg9JzIwOS45MDI2NjknIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtNDEnLz4KPHVzZSB4PScyMTUuMjEzNzE2JyB5PSctNS4wOTEwNDcnIHhsaW5rOmhyZWY9JyNnMy0yNicvPgo8dXNlIHg9JzIyMC4yNjE1MTYnIHk9Jy01LjA5MTA0NycgeGxpbms6aHJlZj0nI2cwLTExNycvPgo8dXNlIHg9JzIzMC4wOTY3NjInIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzItMCcvPgo8dXNlIHg9JzI0NC4wNDQ0NycgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNi00MCcvPgo8dXNlIHg9JzI0OS4zNTU1MTcnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtNjgnLz4KPHVzZSB4PScyNTkuNzg1NTIyJyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTEwNScvPgo8dXNlIHg9JzI2My41NzkxMjcnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzYtMTEnLz4KPHVzZSB4PScyNzIuNTE4MzA3JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c0LTU4Jy8+Cjx1c2UgeD0nMjc2LjMxMTkxJyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2c2LTQxJy8+Cjx1c2UgeD0nMjgxLjYyMjk1NycgeT0nLTUuMDkxMDQ3JyB4bGluazpocmVmPScjZzMtMjYnLz4KPHVzZSB4PScyODYuNjcwNzU3JyB5PSctNS4wOTEwNDcnIHhsaW5rOmhyZWY9JyNnNS0wJy8+Cjx1c2UgeD0nMjkzLjI3MDk4OCcgeT0nLTI0LjU0ODIwMycgeGxpbms6aHJlZj0nI2cxLTEwNScvPgo8dXNlIHg9JzMwMi4xODIwMDMnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzQtMTEzJy8+Cjx1c2UgeD0nMzA4LjczNzY4OCcgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNC01OScvPgo8L2c+Cjwvc3ZnPgo8IS0tIERFUFRIPTAgLS0+)
with discrete operators representing the individual terms of the advection-diffusion equation. For an equation with a source term, it would also need appear in the local residual calculation. Another possibility for choosing would be based on the error of performing the chain-rule on the advection operator.
(3.829)![R = \tilde{G}_i\left(\rho u^i q\right) - \left[\tilde{I}\left(\rho u^i \right) \tilde{G}_i q + \left(\tilde{I}q\right) G_i \left(\rho u^i\right) \right]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzI3Ni40MDYyNTRwdCcgaGVpZ2h0PScyNS4xMDYxMDhwdCcgdmlld0JveD0nNTYuMDY4MzY5IC0yNS4xMDYwOTcgMjc2LjQwNjI1NCAyNS4xMDYxMDgnPgo8ZGVmcz4KPHBhdGggaWQ9J2cwLTAnIGQ9J001Ljc2MDM5OSAxNi4wMjU5MDNDNS43NjAzOTkgMTUuOTcwMTEyIDUuNzMyNTAzIDE1Ljk0MjIxNyA1LjcwNDYwOCAxNS45MDAzNzRDNS4wNjMwMTQgMTUuMjE2OTM2IDQuMTE0NTcgMTQuMDg3MTczIDMuNTI4NzY3IDExLjgxMzY5OUMzLjIwNzk3IDEwLjU0NDQ1OCAzLjA4MjQ0MSA5LjEwNzg0NiAzLjA4MjQ0MSA3LjgxMDcxQzMuMDgyNDQxIDQuMTQyNDY2IDMuOTYxMTQ2IDEuNTc2MDkgNS42MzQ4NjktLjIzNzExMUM1Ljc2MDM5OS0uMzYyNjQgNS43NjAzOTktLjM5MDUzNSA1Ljc2MDM5OS0uNDE4NDMxQzUuNzYwMzk5LS41NTc5MDggNS42NDg4MTctLjU1NzkwOCA1LjU5MzAyNi0uNTU3OTA4QzUuMzgzODExLS41NTc5MDggNC42MzA2MzUgLjI3ODk1NCA0LjQ0OTMxNSAuNDg4MTY5QzMuMDI2NjUgMi4xNzU4NDEgMi4xMjAwNSA0LjY4NjQyNiAyLjEyMDA1IDcuNzk2NzYyQzIuMTIwMDUgOS43NzczMzUgMi40Njg3NDIgMTIuNTgwODIyIDQuMjk1ODkgMTQuOTM3OTgzQzQuNDM1MzY3IDE1LjEwNTM1NSA1LjM0MTk2OCAxNi4xNjUzOCA1LjU5MzAyNiAxNi4xNjUzOEM1LjY0ODgxNyAxNi4xNjUzOCA1Ljc2MDM5OSAxNi4xNjUzOCA1Ljc2MDM5OSAxNi4wMjU5MDNaJy8+CjxwYXRoIGlkPSdnMC0xJyBkPSdNNC4yNTQwNDcgNy44MTA3MUM0LjI1NDA0NyA1LjgzMDEzNyAzLjkwNTM1NSAzLjAyNjY1IDIuMDc4MjA3IC42Njk0ODlDMS45Mzg3MyAuNTAyMTE3IDEuMDMyMTMtLjU1NzkwOCAuNzgxMDcxLS41NTc5MDhDLjcxMTMzMy0uNTU3OTA4IC42MTM2OTktLjUzMDAxMiAuNjEzNjk5LS40MTg0MzFDLjYxMzY5OS0uMzYyNjQgLjY0MTU5NC0uMzIwNzk3IC42OTczODUtLjI3ODk1NEMxLjM2Njg3NCAuNDQ2MzI2IDIuMjczNDc0IDEuNTc2MDkgMi44NDUzMyAzLjc5Mzc3M0MzLjE2NjEyNyA1LjA2MzAxNCAzLjI5MTY1NiA2LjQ5OTYyNiAzLjI5MTY1NiA3Ljc5Njc2MkMzLjI5MTY1NiA5LjIwNTQ3OSAzLjE2NjEyNyAxMC42MjgxNDQgMi44MDM0ODcgMTEuOTk1MDE5QzIuMjczNDc0IDEzLjk0NzY5NiAxLjQ1MDU2IDE1LjA2MzUxMiAuNzM5MjI4IDE1Ljg0NDU4M0MuNjEzNjk5IDE1Ljk3MDExMiAuNjEzNjk5IDE1Ljk5ODAwNyAuNjEzNjk5IDE2LjAyNTkwM0MuNjEzNjk5IDE2LjEzNzQ4NCAuNzExMzMzIDE2LjE2NTM4IC43ODEwNzEgMTYuMTY1MzhDLjk5MDI4NiAxNi4xNjUzOCAxLjc1NzQxIDE1LjMxNDU3IDEuOTI0NzgyIDE1LjExOTMwM0MzLjM0NzQ0NyAxMy40MzE2MzEgNC4yNTQwNDcgMTAuOTIxMDQ2IDQuMjU0MDQ3IDcuODEwNzFaJy8+CjxwYXRoIGlkPSdnMC0xNicgZD0nTTcuMTgzMDY0IDI0LjM4MDU3M0M3LjIxMDk1OSAyNC4zOTQ1MjEgNy4zMzY0ODggMjQuNTMzOTk4IDcuMzUwNDM2IDI0LjUzMzk5OEg3LjY1NzI4NUM3LjY5OTEyOCAyNC41MzM5OTggNy44MTA3MSAyNC41MjAwNSA3LjgxMDcxIDI0LjM5NDUyMUM3LjgxMDcxIDI0LjMzODczIDcuNzgyODE0IDI0LjMxMDgzNCA3Ljc1NDkxOSAyNC4yNjg5OTFDNy4yNTI4MDIgMjMuNzY2ODc0IDYuNDk5NjI2IDIyLjk5OTc1MSA1LjYzNDg2OSAyMS40NjU1MDRDNC4xMjg1MTggMTguNzg3NTQ3IDMuNTcwNjEgMTUuMzQyNDY2IDMuNTcwNjEgMTEuOTk1MDE5QzMuNTcwNjEgNS44MDIyNDIgNS4zMjgwMiAyLjE2MTg5MyA3Ljc2ODg2Ny0uMzA2ODQ5QzcuODEwNzEtLjM0ODY5MiA3LjgxMDcxLS4zOTA1MzUgNy44MTA3MS0uNDE4NDMxQzcuODEwNzEtLjU1NzkwOCA3LjcxMzA3Ni0uNTU3OTA4IDcuNTQ1NzA0LS41NTc5MDhDNy4zNjQzODQtLjU1NzkwOCA3LjMzNjQ4OC0uNTU3OTA4IDcuMjEwOTU5LS40NDYzMjZDNS44ODU5MjggLjY5NzM4NSA0LjM5MzUyNCAyLjYzNjExNSAzLjQzMTEzMyA1LjU3OTA3OEMyLjgzMTM4MiA3LjQyMDE3NCAyLjUxMDU4NSA5LjY2NTc1MyAyLjUxMDU4NSAxMS45ODEwNzFDMi41MTA1ODUgMTUuMjg2Njc1IDMuMTEwMzM2IDE5LjAyNDY1OCA1LjMwMDEyNSAyMi4yNjA1MjNDNS42NzY3MTIgMjIuODA0NDgzIDYuMTkyNzc3IDIzLjM3NjMzOSA2LjE5Mjc3NyAyMy4zOTAyODZDNi4zMzIyNTQgMjMuNTU3NjU5IDYuNTI3NTIyIDIzLjc4MDgyMiA2LjYzOTEwMyAyMy44Nzg0NTZMNy4xODMwNjQgMjQuMzgwNTczWicvPgo8cGF0aCBpZD0nZzAtMTcnIGQ9J001LjgwMjI0MiAxMS45ODEwNzFDNS44MDIyNDIgNy45NzgwODIgNC44Njc3NDYgMy43MjQwMzUgMi4xMjAwNSAuNTg1ODAzQzEuOTI0NzgyIC4zNjI2NCAxLjQwODcxNy0uMTgxMzIgMS4wNzM5NzMtLjQ3NDIyMkMuOTc2MzM5LS41NTc5MDggLjk0ODQ0My0uNTU3OTA4IC43NjcxMjMtLjU1NzkwOEMuNjI3NjQ2LS41NTc5MDggLjUwMjExNy0uNTU3OTA4IC41MDIxMTctLjQxODQzMUMuNTAyMTE3LS4zNjI2NCAuNTU3OTA4LS4zMDY4NDkgLjU4NTgwMy0uMjc4OTU0QzEuMDYwMDI1IC4yMDkyMTUgMS44MTMyIC45NzYzMzkgMi42Nzc5NTggMi41MTA1ODVDNC4xODQzMDkgNS4xODg1NDMgNC43NDIyMTcgOC42MzM2MjQgNC43NDIyMTcgMTEuOTgxMDcxQzQuNzQyMjE3IDE4LjAzNDM3MSAzLjA2ODQ5MyAyMS43MzA1MTEgLjU1NzkwOCAyNC4yODI5MzlDLjUzMDAxMiAyNC4zMTA4MzQgLjUwMjExNyAyNC4zNTI2NzcgLjUwMjExNyAyNC4zOTQ1MjFDLjUwMjExNyAyNC41MzM5OTggLjYyNzY0NiAyNC41MzM5OTggLjc2NzEyMyAyNC41MzM5OThDLjk0ODQ0MyAyNC41MzM5OTggLjk3NjMzOSAyNC41MzM5OTggMS4xMDE4NjggMjQuNDIyNDE2QzIuNDI2ODk5IDIzLjI3ODcwNSAzLjkxOTMwMyAyMS4zMzk5NzUgNC44ODE2OTQgMTguMzk3MDExQzUuNDk1MzkyIDE2LjQ4NjE3NyA1LjgwMjI0MiAxNC4yMjY2NSA1LjgwMjI0MiAxMS45ODEwNzFaJy8+CjxwYXRoIGlkPSdnMC0xMDQnIGQ9J00zLjE1MjE3OSAyNC41MzM5OThINi4zMTgzMDZWMjMuODc4NDU2SDMuODA3NzIxVi4wOTc2MzRINi4zMTgzMDZWLS41NTc5MDhIMy4xNTIxNzlWMjQuNTMzOTk4WicvPgo8cGF0aCBpZD0nZzAtMTA1JyBkPSdNMi43NjE2NDQgMjMuODc4NDU2SC4yNTEwNTlWMjQuNTMzOTk4SDMuNDE3MTg2Vi0uNTU3OTA4SC4yNTEwNTlWLjA5NzYzNEgyLjc2MTY0NFYyMy44Nzg0NTZaJy8+CjxwYXRoIGlkPSdnMi0xMDUnIGQ9J00yLjc3Mjc5LTYuMTAyMDlDMi43NzI3OS02LjI5NzM1NyAyLjYzNjEwMy02LjQ1MzU3MSAyLjQxMTU0Ni02LjQ1MzU3MUMyLjE0NzkzNi02LjQ1MzU3MSAxLjg4NDMyNi02LjE5OTcyNCAxLjg4NDMyNi01LjkzNjExNEMxLjg4NDMyNi01Ljc1MDYxIDIuMDIxMDEyLTUuNTg0NjMzIDIuMjU1MzMzLTUuNTg0NjMzQzIuNDc5ODktNS41ODQ2MzMgMi43NzI3OS01LjgwOTE5IDIuNzcyNzktNi4xMDIwOVpNMi4wMzA3NzYtMi40MzEwNzNDMi4xNDc5MzYtMi43MTQyMSAyLjE0NzkzNi0yLjczMzczNyAyLjI0NTU2OS0yLjk5NzM0N0MyLjMyMzY3Ni0zLjE5MjYxNCAyLjM3MjQ5My0zLjMyOTMwMSAyLjM3MjQ5My0zLjUxNDgwNEMyLjM3MjQ5My0zLjk1NDE1NSAyLjA2MDA2Ni00LjMxNTM5OCAxLjU3MTg5OS00LjMxNTM5OEMuNjU0MTQ0LTQuMzE1Mzk4IC4yODMxMzctMi44OTk3MTMgLjI4MzEzNy0yLjgxMTg0M0MuMjgzMTM3LTIuNzE0MjEgLjM4MDc3LTIuNzE0MjEgLjQwMDI5Ny0yLjcxNDIxQy40OTc5MzEtMi43MTQyMSAuNTA3Njk0LTIuNzMzNzM3IC41NTY1MTEtMi44ODk5NUMuODIwMTIxLTMuODA3NzA0IDEuMjEwNjU1LTQuMTAwNjA1IDEuNTQyNjA4LTQuMTAwNjA1QzEuNjIwNzE1LTQuMTAwNjA1IDEuNzg2NjkyLTQuMTAwNjA1IDEuNzg2NjkyLTMuNzg4MTc4QzEuNzg2NjkyLTMuNTgzMTQ4IDEuNzE4MzQ5LTMuMzc4MTE3IDEuNjc5Mjk1LTMuMjgwNDg0QzEuNjAxMTg5LTMuMDI2NjM3IDEuMTYxODM4LTEuODk0MDg5IDEuMDA1NjI1LTEuNDc0MjY1Qy45MDc5OTEtMS4yMjA0MTggLjc4MTA2OC0uODk4MjI4IC43ODEwNjgtLjY5MzE5N0MuNzgxMDY4LS4yMzQzMiAxLjExMzAyMSAuMTA3Mzk3IDEuNTgxNjYyIC4xMDczOTdDMi40OTk0MTYgLjEwNzM5NyAyLjg2MDY2LTEuMzA4Mjg4IDIuODYwNjYtMS4zOTYxNThDMi44NjA2Ni0xLjQ5Mzc5MiAyLjc3Mjc5LTEuNDkzNzkyIDIuNzQzNS0xLjQ5Mzc5MkMyLjY0NTg2Ni0xLjQ5Mzc5MiAyLjY0NTg2Ni0xLjQ2NDUwMiAyLjU5NzA1LTEuMzE4MDUyQzIuNDIxMzA5LS43MDI5NjEgMi4wOTkxMTktLjEwNzM5NyAxLjYwMTE4OS0uMTA3Mzk3QzEuNDM1MjEyLS4xMDczOTcgMS4zNjY4NjgtLjIwNTAzIDEuMzY2ODY4LS40Mjk1ODdDMS4zNjY4NjgtLjY3MzY3MSAxLjQyNTQ0OC0uODEwMzU4IDEuNjUwMDA1LTEuNDA1OTIyTDIuMDMwNzc2LTIuNDMxMDczWicvPgo8cGF0aCBpZD0nZzMtMjYnIGQ9J00uNDMyMzc5IDIuNDEyOTUxQy40MTg0MzEgMi40ODI2OSAuMzkwNTM1IDIuNTY2Mzc2IC4zOTA1MzUgMi42NTAwNjJDLjM5MDUzNSAyLjg1OTI3OCAuNTU3OTA4IDIuOTk4NzU1IC43NjcxMjMgMi45OTg3NTVTMS4xNzE2MDYgMi44NTkyNzggMS4yNTUyOTMgMi42NjQwMUMxLjMxMTA4MyAyLjUzODQ4MSAxLjcwMTYxOSAuODY0NzU3IDIuMTQ3OTQ1LS44NTA4MDlDMi40MjY4OTktLjE1MzQyNSAyLjk0Mjk2NCAuMTM5NDc3IDMuNDg2OTI0IC4xMzk0NzdDNS4wNjMwMTQgLjEzOTQ3NyA2Ljg0ODMxOS0xLjgxMzIgNi44NDgzMTktMy45MTkzMDNDNi44NDgzMTktNS40MTE3MDYgNS45NDE3MTktNi4xNTA5MzQgNC45NzkzMjgtNi4xNTA5MzRDMy43NTE5My02LjE1MDkzNCAyLjI1OTUyNy00Ljg4MTY5NCAxLjc5OTI1My0zLjAyNjY1TC40MzIzNzkgMi40MTI5NTFaTTMuNDcyOTc2LS4xMzk0NzdDMi41MjQ1MzMtLjEzOTQ3NyAyLjI4NzQyMi0xLjI0MTM0NSAyLjI4NzQyMi0xLjQwODcxN0MyLjI4NzQyMi0xLjQ5MjQwMyAyLjYzNjExNS0yLjgxNzQzNSAyLjY3Nzk1OC0zLjAyNjY1QzMuMzg5MjktNS44MDIyNDIgNC43NTYxNjQtNS44NzE5OCA0Ljk2NTM4LTUuODcxOThDNS41OTMwMjYtNS44NzE5OCA1Ljk0MTcxOS01LjMwMDEyNSA1Ljk0MTcxOS00LjQ3NzIxQzUuOTQxNzE5LTMuNzY1ODc4IDUuNTY1MTMxLTIuMzg1MDU2IDUuMzI4MDItMS43OTkyNTNDNC45MDk1ODktLjgzNjg2MiA0LjE4NDMwOS0uMTM5NDc3IDMuNDcyOTc2LS4xMzk0NzdaJy8+CjxwYXRoIGlkPSdnMy03MScgZD0nTTEwLjQwNDk4MS05LjY5MzY0OUMxMC40MDQ5ODEtOS44MTkxNzggMTAuMzA3MzQ3LTkuODE5MTc4IDEwLjI3OTQ1Mi05LjgxOTE3OFMxMC4xOTU3NjYtOS44MTkxNzggMTAuMDg0MTg0LTkuNjc5NzAxTDkuMTIxNzkzLTguNTIyMDQyQzkuMDUyMDU1LTguNjMzNjI0IDguNzczMTAxLTkuMTIxNzkzIDguMjI5MTQxLTkuNDQyNTlDNy42MjkzOS05LjgxOTE3OCA3LjAyOTYzOS05LjgxOTE3OCA2LjgyMDQyMy05LjgxOTE3OEMzLjgzNTYxNi05LjgxOTE3OCAuNjk3Mzg1LTYuNzc4NTggLjY5NzM4NS0zLjQ4NjkyNEMuNjk3Mzg1LTEuMTg1NTU0IDIuMjg3NDIyIC4yOTI5MDIgNC4zNzk1NzcgLjI5MjkwMkM1LjM4MzgxMSAuMjkyOTAyIDYuNjUzMDUxLS4wNDE4NDMgNy4zNTA0MzYtLjkyMDU0OEM3LjUwMzg2MS0uMzkwNTM1IDcuODEwNzEtLjAxMzk0OCA3LjkwODM0NC0uMDEzOTQ4QzcuOTc4MDgyLS4wMTM5NDggNy45OTIwMy0uMDU1NzkxIDguMDA1OTc4LS4wNTU3OTFDOC4wMTk5MjUtLjA4MzY4NiA4LjEzMTUwNy0uNTcxODU2IDguMjAxMjQ1LS44MjI5MTRMOC40MjQ0MDgtMS43MTU1NjdDOC41MzU5OS0yLjE3NTg0MSA4LjU5MTc4MS0yLjM3MTEwOCA4LjY4OTQxNS0yLjc4OTUzOUM4LjgyODg5Mi0zLjMxOTU1MiA4Ljg1Njc4Ny0zLjM2MTM5NSA5LjYyMzkxLTMuMzc1MzQyQzkuNjc5NzAxLTMuMzc1MzQyIDkuODQ3MDczLTMuMzc1MzQyIDkuODQ3MDczLTMuNjQwMzQ5QzkuODQ3MDczLTMuNzc5ODI2IDkuNzA3NTk3LTMuNzc5ODI2IDkuNjY1NzUzLTMuNzc5ODI2QzkuNDI4NjQzLTMuNzc5ODI2IDkuMTYzNjM2LTMuNzUxOTMgOC45MTI1NzgtMy43NTE5M0g4LjE1OTQwMkM3LjU3MzU5OS0zLjc1MTkzIDYuOTU5OS0zLjc3OTgyNiA2LjM4ODA0NS0zLjc3OTgyNkM2LjI2MjUxNi0zLjc3OTgyNiA2LjA5NTE0My0zLjc3OTgyNiA2LjA5NTE0My0zLjUyODc2N0M2LjA5NTE0My0zLjM4OTI5IDYuMjA2NzI1LTMuMzg5MjkgNi4yMDY3MjUtMy4zNzUzNDJINi41NTU0MTdDNy42NTcyODUtMy4zNzUzNDIgNy42NTcyODUtMy4yNjM3NjEgNy42NTcyODUtMy4wNTQ1NDVDNy42NTcyODUtMy4wNDA1OTggNy4zOTIyNzktMS42MzE4OCA3LjEyNzI3My0xLjIxMzQ1QzYuNTk3MjYtLjQzMjM3OSA1LjQ5NTM5Mi0uMTExNTgyIDQuNjcyNDc4LS4xMTE1ODJDMy41OTg1MDYtLjExMTU4MiAxLjg1NTA0NC0uNjY5NDg5IDEuODU1MDQ0LTMuMDgyNDQxQzEuODU1MDQ0LTQuMDE2OTM2IDIuMTg5Nzg4LTYuMTUwOTM0IDMuNTQyNzE1LTcuNzI3MDI0QzQuNDIxNDItOC43MzEyNTggNS43MTg1NTUtOS40MTQ2OTUgNi45NDU5NTMtOS40MTQ2OTVDOC41OTE3ODEtOS40MTQ2OTUgOS4xNzc1ODQtOC4wMDU5NzggOS4xNzc1ODQtNi43MjI3OUM5LjE3NzU4NC02LjQ5OTYyNiA5LjEyMTc5My02LjE5Mjc3NyA5LjEyMTc5My01Ljk5NzUwOUM5LjEyMTc5My01Ljg3MTk4IDkuMjYxMjctNS44NzE5OCA5LjMwMzExMy01Ljg3MTk4QzkuNDU2NTM4LTUuODcxOTggOS40NzA0ODYtNS44ODU5MjggOS41MjYyNzYtNi4xMzY5ODZMMTAuNDA0OTgxLTkuNjkzNjQ5WicvPgo8cGF0aCBpZD0nZzMtNzMnIGQ9J001LjEzMjc1Mi04LjQ5NDE0N0M1LjI1ODI4MS04Ljk4MjMxNiA1LjI4NjE3Ny05LjEyMTc5MyA2LjMwNDM1OS05LjEyMTc5M0M2LjYxMTIwOC05LjEyMTc5MyA2LjcyMjc5LTkuMTIxNzkzIDYuNzIyNzktOS4zODY4QzYuNzIyNzktOS41MjYyNzYgNi41NjkzNjUtOS41MjYyNzYgNi41Mjc1MjItOS41MjYyNzZDNi4yNzY0NjMtOS41MjYyNzYgNS45Njk2MTQtOS40OTgzODEgNS43MTg1NTUtOS40OTgzODFINC4wMDI5ODlDMy43MjQwMzUtOS40OTgzODEgMy40MDMyMzgtOS41MjYyNzYgMy4xMjQyODQtOS41MjYyNzZDMy4wMTI3MDItOS41MjYyNzYgMi44NTkyNzgtOS41MjYyNzYgMi44NTkyNzgtOS4yNjEyN0MyLjg1OTI3OC05LjEyMTc5MyAyLjk3MDg1OS05LjEyMTc5MyAzLjI0OTgxMy05LjEyMTc5M0M0LjExNDU3LTkuMTIxNzkzIDQuMTE0NTctOS4wMTAyMTIgNC4xMTQ1Ny04Ljg1Njc4N0M0LjExNDU3LTguNzU5MTUzIDQuMDg2Njc1LTguNjc1NDY3IDQuMDU4NzgtOC41NDk5MzhMMi4xNzU4NDEtMS4wMzIxM0MyLjA1MDMxMS0uNTQzOTYgMi4wMjI0MTYtLjQwNDQ4MyAxLjAwNDIzNC0uNDA0NDgzQy42OTczODUtLjQwNDQ4MyAuNTcxODU2LS40MDQ0ODMgLjU3MTg1Ni0uMTM5NDc3Qy41NzE4NTYgMCAuNzExMzMzIDAgLjc4MTA3MSAwQzEuMDMyMTMgMCAxLjMzODk3OS0uMDI3ODk1IDEuNTkwMDM3LS4wMjc4OTVIMy4zMDU2MDRDMy41ODQ1NTgtLjAyNzg5NSAzLjg5MTQwNyAwIDQuMTcwMzYxIDBDNC4yODE5NDMgMCA0LjQ0OTMxNSAwIDQuNDQ5MzE1LS4yNTEwNTlDNC40NDkzMTUtLjQwNDQ4MyA0LjM2NTYyOS0uNDA0NDgzIDQuMDU4NzgtLjQwNDQ4M0MzLjE5NDAyMi0uNDA0NDgzIDMuMTk0MDIyLS41MTYwNjUgMy4xOTQwMjItLjY4MzQzN0MzLjE5NDAyMi0uNzExMzMzIDMuMTk0MDIyLS43ODEwNzEgMy4yNDk4MTMtMS4wMDQyMzRMNS4xMzI3NTItOC40OTQxNDdaJy8+CjxwYXRoIGlkPSdnMy04MicgZD0nTTUuMTMyNzUyLTguNTc3ODMzQzUuMjU4MjgxLTkuMDkzODk4IDUuMzE0MDcyLTkuMTIxNzkzIDUuODU4MDMyLTkuMTIxNzkzSDYuODYyMjY3QzguMDYxNzY4LTkuMTIxNzkzIDguOTU0NDIxLTguNzU5MTUzIDguOTU0NDIxLTcuNjcxMjMzQzguOTU0NDIxLTYuOTU5OSA4LjU5MTc4MS00LjkwOTU4OSA1Ljc4ODI5NC00LjkwOTU4OUg0LjIxMjIwNEw1LjEzMjc1Mi04LjU3NzgzM1pNNy4wNzE0ODItNC43NDIyMTdDOC44MDA5OTYtNS4xMTg4MDQgMTAuMTUzOTIzLTYuMjM0NjIgMTAuMTUzOTIzLTcuNDM0MTIyQzEwLjE1MzkyMy04LjUyMjA0MiA5LjA1MjA1NS05LjUyNjI3NiA3LjExMzMyNS05LjUyNjI3NkgzLjMzMzQ5OUMzLjA1NDU0NS05LjUyNjI3NiAyLjkyOTAxNi05LjUyNjI3NiAyLjkyOTAxNi05LjI2MTI3QzIuOTI5MDE2LTkuMTIxNzkzIDMuMDI2NjUtOS4xMjE3OTMgMy4yOTE2NTYtOS4xMjE3OTNDNC4xMjg1MTgtOS4xMjE3OTMgNC4xMjg1MTgtOS4wMTAyMTIgNC4xMjg1MTgtOC44NTY3ODdDNC4xMjg1MTgtOC44Mjg4OTIgNC4xMjg1MTgtOC43NDUyMDUgNC4wNzI3MjctOC41MzU5OUwyLjE4OTc4OC0xLjAzMjEzQzIuMDY0MjU5LS41NDM5NiAyLjAzNjM2NC0uNDA0NDgzIDEuMDczOTczLS40MDQ0ODNDLjc1MzE3Ni0uNDA0NDgzIC42NTU1NDItLjQwNDQ4MyAuNjU1NTQyLS4xMzk0NzdDLjY1NTU0MiAwIC44MDg5NjYgMCAuODUwODA5IDBDMS4xMDE4NjggMCAxLjM5NDc3LS4wMjc4OTUgMS42NTk3NzYtLjAyNzg5NUgzLjMwNTYwNEMzLjU1NjY2My0uMDI3ODk1IDMuODQ5NTY0IDAgNC4xMDA2MjMgMEM0LjIxMjIwNCAwIDQuMzY1NjI5IDAgNC4zNjU2MjktLjI2NTAwNkM0LjM2NTYyOS0uNDA0NDgzIDQuMjQwMS0uNDA0NDgzIDQuMDMwODg0LS40MDQ0ODNDMy4xODAwNzUtLjQwNDQ4MyAzLjE4MDA3NS0uNTE2MDY1IDMuMTgwMDc1LS42NTU1NDJDMy4xODAwNzUtLjY2OTQ4OSAzLjE4MDA3NS0uNzY3MTIzIDMuMjA3OTctLjg3ODcwNUw0LjE0MjQ2Ni00LjYzMDYzNUg1LjgxNjE4OUM3LjE0MTIyLTQuNjMwNjM1IDcuMzkyMjc5LTMuNzkzNzczIDcuMzkyMjc5LTMuMzMzNDk5QzcuMzkyMjc5LTMuMTI0Mjg0IDcuMjUyODAyLTIuNTgwMzI0IDcuMTU1MTY4LTIuMjE3Njg0QzcuMDAxNzQzLTEuNTc2MDkgNi45NTk5LTEuNDIyNjY1IDYuOTU5OS0xLjE1NzY1OUM2Ljk1OTktLjE2NzM3MiA3Ljc2ODg2NyAuMjkyOTAyIDguNzAzMzYyIC4yOTI5MDJDOS44MzMxMjYgLjI5MjkwMiAxMC4zMjEyOTUtMS4wODc5MiAxMC4zMjEyOTUtMS4yODMxODhDMTAuMzIxMjk1LTEuMzgwODIyIDEwLjI1MTU1Ny0xLjQyMjY2NSAxMC4xNjc4Ny0xLjQyMjY2NUMxMC4wNTYyODktMS40MjI2NjUgMTAuMDI4Mzk0LTEuMzM4OTc5IDEwLjAwMDQ5OC0xLjIyNzM5N0M5LjY2NTc1My0uMjM3MTExIDkuMDkzODk4IC4wMTM5NDggOC43NDUyMDUgLjAxMzk0OFM4LjE3MzM1LS4xMzk0NzcgOC4xNzMzNS0uNzY3MTIzQzguMTczMzUtMS4xMDE4NjggOC4zNDA3MjItMi4zNzExMDggOC4zNTQ2Ny0yLjQ0MDg0N0M4LjQyNDQwOC0yLjk1NjkxMiA4LjQyNDQwOC0zLjAxMjcwMiA4LjQyNDQwOC0zLjEyNDI4NEM4LjQyNDQwOC00LjE0MjQ2NiA3LjYwMTQ5NC00LjU3NDg0NCA3LjA3MTQ4Mi00Ljc0MjIxN1onLz4KPHBhdGggaWQ9J2czLTExMycgZD0nTTYuMTUwOTM0LTYuMDExNDU3QzYuMTUwOTM0LTYuMDgxMTk2IDYuMDk1MTQzLTYuMTM2OTg2IDYuMDI1NDA1LTYuMTM2OTg2QzUuOTEzODIzLTYuMTM2OTg2IDUuMzY5ODYzLTUuNjM0ODY5IDUuMTA0ODU3LTUuMTQ2N0M0Ljg1Mzc5OC01Ljc3NDM0NiA0LjQyMTQyLTYuMTUwOTM0IDMuODIxNjY5LTYuMTUwOTM0QzIuMjQ1NTc5LTYuMTUwOTM0IC41NDM5Ni00LjExNDU3IC41NDM5Ni0yLjA1MDMxMUMuNTQzOTYtLjY2OTQ4OSAxLjM1MjkyNyAuMTM5NDc3IDIuMzAxMzcgLjEzOTQ3N0MzLjA0MDU5OCAuMTM5NDc3IDMuNjU0Mjk2LS40MTg0MzEgMy45NDcxOTgtLjczOTIyOEwzLjk2MTE0Ni0uNzI1MjhMMy40MzExMzMgMS4zNjY4NzRMMy4zMDU2MDQgMS44Njg5OTFDMy4xODAwNzUgMi4yODc0MjIgMi45NzA4NTkgMi4yODc0MjIgMi4zMTUzMTggMi4zMDEzN0MyLjE2MTg5MyAyLjMwMTM3IDIuMDIyNDE2IDIuMzAxMzcgMi4wMjI0MTYgMi41NjYzNzZDMi4wMjI0MTYgMi42NjQwMSAyLjEwNjEwMiAyLjcwNTg1MyAyLjIwMzczNiAyLjcwNTg1M0MyLjM5OTAwNCAyLjcwNTg1MyAyLjY1MDA2MiAyLjY3Nzk1OCAyLjg0NTMzIDIuNjc3OTU4SDQuMjY3OTk1QzQuNDc3MjEgMi42Nzc5NTggNC43MTQzMjEgMi43MDU4NTMgNC45MjM1MzcgMi43MDU4NTNDNS4wMDcyMjMgMi43MDU4NTMgNS4xNzQ1OTUgMi43MDU4NTMgNS4xNzQ1OTUgMi40NDA4NDdDNS4xNzQ1OTUgMi4zMDEzNyA1LjA2MzAxNCAyLjMwMTM3IDQuODUzNzk4IDIuMzAxMzdDNC4xOTgyNTcgMi4zMDEzNyA0LjE1NjQxMyAyLjIwMzczNiA0LjE1NjQxMyAyLjA5MjE1NEM0LjE1NjQxMyAyLjAyMjQxNiA0LjE3MDM2MSAyLjAwODQ2OCA0LjIxMjIwNCAxLjgyNzE0OEw2LjE1MDkzNC02LjAxMTQ1N1pNNC4xODQzMDktMS42NTk3NzZDNC4xMTQ1Ny0xLjQyMjY2NSA0LjExNDU3LTEuMzk0NzcgMy45MTkzMDMtMS4xMjk3NjNDMy42MTI0NTMtLjczOTIyOCAyLjk5ODc1NS0uMTM5NDc3IDIuMzQzMjEzLS4xMzk0NzdDMS43NzEzNTctLjEzOTQ3NyAxLjQ1MDU2LS42NTU1NDIgMS40NTA1Ni0xLjQ3ODQ1NkMxLjQ1MDU2LTIuMjQ1NTc5IDEuODgyOTM5LTMuODA3NzIxIDIuMTQ3OTQ1LTQuMzkzNTI0QzIuNjIyMTY3LTUuMzY5ODYzIDMuMjc3NzA5LTUuODcxOTggMy44MjE2NjktNS44NzE5OEM0Ljc0MjIxNy01Ljg3MTk4IDQuOTIzNTM3LTQuNzI4MjY5IDQuOTIzNTM3LTQuNjE2Njg3QzQuOTIzNTM3LTQuNjAyNzQgNC44ODE2OTQtNC40MjE0MiA0Ljg2Nzc0Ni00LjM5MzUyNEw0LjE4NDMwOS0xLjY1OTc3NlonLz4KPHBhdGggaWQ9J2czLTExNycgZD0nTTQuNzU2MTY0LS44MDg5NjZDNC45Mzc0ODQtLjAyNzg5NSA1LjYwNjk3NCAuMTM5NDc3IDUuOTQxNzE5IC4xMzk0NzdDNi4zODgwNDUgLjEzOTQ3NyA2LjcyMjc5LS4xNTM0MjUgNi45NDU5NTMtLjYyNzY0NkM3LjE4MzA2NC0xLjEyOTc2MyA3LjM2NDM4NC0xLjk1MjY3NyA3LjM2NDM4NC0xLjk5NDUyMUM3LjM2NDM4NC0yLjA2NDI1OSA3LjMwODU5My0yLjEyMDA1IDcuMjI0OTA3LTIuMTIwMDVDNy4wOTkzNzctMi4xMjAwNSA3LjA4NTQzLTIuMDUwMzExIDcuMDI5NjM5LTEuODQxMDk2QzYuNzc4NTgtLjg3ODcwNSA2LjUyNzUyMi0uMTM5NDc3IDUuOTY5NjE0LS4xMzk0NzdDNS41NTExODMtLjEzOTQ3NyA1LjU1MTE4My0uNTk5NzUxIDUuNTUxMTgzLS43ODEwNzFDNS41NTExODMtMS4xMDE4NjggNS41OTMwMjYtMS4yNDEzNDUgNS43MzI1MDMtMS44MjcxNDhDNS44MzAxMzctMi4yMDM3MzYgNS45Mjc3NzEtMi41ODAzMjQgNi4wMTE0NTctMi45NzA4NTlMNi41ODMzMTMtNS4yNDQzMzRDNi42ODA5NDYtNS41OTMwMjYgNi42ODA5NDYtNS42MjA5MjIgNi42ODA5NDYtNS42NjI3NjVDNi42ODA5NDYtNS44NzE5OCA2LjUxMzU3NC02LjAxMTQ1NyA2LjMwNDM1OS02LjAxMTQ1N0M1Ljg5OTg3NS02LjAxMTQ1NyA1LjgwMjI0Mi01LjY2Mjc2NSA1LjcxODU1NS01LjMxNDA3MkM1LjU3OTA3OC00Ljc3MDExMiA0LjgyNTkwMy0xLjc3MTM1NyA0LjcyODI2OS0xLjI4MzE4OEM0LjcxNDMyMS0xLjI4MzE4OCA0LjE3MDM2MS0uMTM5NDc3IDMuMTUyMTc5LS4xMzk0NzdDMi40MjY4OTktLjEzOTQ3NyAyLjI4NzQyMi0uNzY3MTIzIDIuMjg3NDIyLTEuMjgzMTg4QzIuMjg3NDIyLTIuMDc4MjA3IDIuNjc3OTU4LTMuMTk0MDIyIDMuMDQwNTk4LTQuMTI4NTE4QzMuMjA3OTctNC41NzQ4NDQgMy4yNzc3MDktNC43NTYxNjQgMy4yNzc3MDktNS4wMzUxMThDMy4yNzc3MDktNS42MzQ4NjkgMi44NDUzMy02LjE1MDkzNCAyLjE3NTg0MS02LjE1MDkzNEMuODkyNjUzLTYuMTUwOTM0IC4zNzY1ODgtNC4xMjg1MTggLjM3NjU4OC00LjAxNjkzNkMuMzc2NTg4LTMuOTYxMTQ2IC40MzIzNzktMy44OTE0MDcgLjUzMDAxMi0zLjg5MTQwN0MuNjU1NTQyLTMuODkxNDA3IC42Njk0ODktMy45NDcxOTggLjcyNTI4LTQuMTQyNDY2QzEuMDYwMDI1LTUuMzQxOTY4IDEuNjAzOTg1LTUuODcxOTggMi4xMzM5OTgtNS44NzE5OEMyLjI3MzQ3NC01Ljg3MTk4IDIuNDk2NjM4LTUuODU4MDMyIDIuNDk2NjM4LTUuNDExNzA2QzIuNDk2NjM4LTUuMDQ5MDY2IDIuMzQzMjEzLTQuNjQ0NTgzIDIuMTMzOTk4LTQuMTE0NTdDMS41MjAyOTktMi40NTQ3OTUgMS40NTA1Ni0xLjkyNDc4MiAxLjQ1MDU2LTEuNTA2MzUxQzEuNDUwNTYtLjA4MzY4NiAyLjUyNDUzMyAuMTM5NDc3IDMuMDk2Mzg5IC4xMzk0NzdDMy45ODkwNDEgLjEzOTQ3NyA0LjQ3NzIxLS40NzQyMjIgNC43NTYxNjQtLjgwODk2NlonLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J005LjE5MTUzMi0zLjIwNzk3QzkuNDI4NjQzLTMuMjA3OTcgOS42Nzk3MDEtMy4yMDc5NyA5LjY3OTcwMS0zLjQ4NjkyNFM5LjQyODY0My0zLjc2NTg3OCA5LjE5MTUzMi0zLjc2NTg3OEgxLjY0NTgyOEMxLjQwODcxNy0zLjc2NTg3OCAxLjE1NzY1OS0zLjc2NTg3OCAxLjE1NzY1OS0zLjQ4NjkyNFMxLjQwODcxNy0zLjIwNzk3IDEuNjQ1ODI4LTMuMjA3OTdIOS4xOTE1MzJaJy8+CjxwYXRoIGlkPSdnNC00MycgZD0nTTUuNTY1MTMxLTMuMjIxOTE4SDkuNDE0Njk1QzkuNjA5OTYzLTMuMjIxOTE4IDkuODYxMDIxLTMuMjIxOTE4IDkuODYxMDIxLTMuNDcyOTc2QzkuODYxMDIxLTMuNzM3OTgzIDkuNjIzOTEtMy43Mzc5ODMgOS40MTQ2OTUtMy43Mzc5ODNINS41NjUxMzFWLTcuNTg3NTQ3QzUuNTY1MTMxLTcuNzgyODE0IDUuNTY1MTMxLTguMDMzODczIDUuMzE0MDcyLTguMDMzODczQzUuMDQ5MDY2LTguMDMzODczIDUuMDQ5MDY2LTcuNzk2NzYyIDUuMDQ5MDY2LTcuNTg3NTQ3Vi0zLjczNzk4M0gxLjE5OTUwMkMxLjAwNDIzNC0zLjczNzk4MyAuNzUzMTc2LTMuNzM3OTgzIC43NTMxNzYtMy40ODY5MjRDLjc1MzE3Ni0zLjIyMTkxOCAuOTkwMjg2LTMuMjIxOTE4IDEuMTk5NTAyLTMuMjIxOTE4SDUuMDQ5MDY2Vi42Mjc2NDZDNS4wNDkwNjYgLjgyMjkxNCA1LjA0OTA2NiAxLjA3Mzk3MyA1LjMwMDEyNSAxLjA3Mzk3M0M1LjU2NTEzMSAxLjA3Mzk3MyA1LjU2NTEzMSAuODM2ODYyIDUuNTY1MTMxIC42Mjc2NDZWLTMuMjIxOTE4WicvPgo8cGF0aCBpZD0nZzQtNjEnIGQ9J005LjQxNDY5NS00LjUxOTA1NEM5LjYwOTk2My00LjUxOTA1NCA5Ljg2MTAyMS00LjUxOTA1NCA5Ljg2MTAyMS00Ljc3MDExMkM5Ljg2MTAyMS01LjAzNTExOCA5LjYyMzkxLTUuMDM1MTE4IDkuNDE0Njk1LTUuMDM1MTE4SDEuMTk5NTAyQzEuMDA0MjM0LTUuMDM1MTE4IC43NTMxNzYtNS4wMzUxMTggLjc1MzE3Ni00Ljc4NDA2Qy43NTMxNzYtNC41MTkwNTQgLjk5MDI4Ni00LjUxOTA1NCAxLjE5OTUwMi00LjUxOTA1NEg5LjQxNDY5NVpNOS40MTQ2OTUtMS45MjQ3ODJDOS42MDk5NjMtMS45MjQ3ODIgOS44NjEwMjEtMS45MjQ3ODIgOS44NjEwMjEtMi4xNzU4NDFDOS44NjEwMjEtMi40NDA4NDcgOS42MjM5MS0yLjQ0MDg0NyA5LjQxNDY5NS0yLjQ0MDg0N0gxLjE5OTUwMkMxLjAwNDIzNC0yLjQ0MDg0NyAuNzUzMTc2LTIuNDQwODQ3IC43NTMxNzYtMi4xODk3ODhDLjc1MzE3Ni0xLjkyNDc4MiAuOTkwMjg2LTEuOTI0NzgyIDEuMTk5NTAyLTEuOTI0NzgySDkuNDE0Njk1WicvPgo8cGF0aCBpZD0nZzQtMTI2JyBkPSdNNS40ODE0NDUtOS4yNjEyN0M1LjA3Njk2MS04Ljg1Njc4NyA0Ljc4NDA2LTguNTc3ODMzIDQuMzM3NzMzLTguNTc3ODMzQzQuMTI4NTE4LTguNTc3ODMzIDMuOTMzMjUtOC42MTk2NzYgMy41MDA4NzItOC45MTI1NzhDMy4yMjE5MTgtOS4wNzk5NSAyLjk0Mjk2NC05LjI2MTI3IDIuNjIyMTY3LTkuMjYxMjdDMi4xMDYxMDItOS4yNjEyNyAxLjc5OTI1My04LjkxMjU3OCAxLjE0MzcxMS04LjE4NzI5OEwxLjMzODk3OS03Ljk5MjAzQzEuNzQzNDYyLTguMzk2NTEzIDIuMDM2MzY0LTguNjc1NDY3IDIuNDgyNjktOC42NzU0NjdDMi42OTE5MDUtOC42NzU0NjcgMi44ODcxNzMtOC42MzM2MjQgMy4zMTk1NTItOC4zNDA3MjJDMy41OTg1MDYtOC4xNzMzNSAzLjg3NzQ2LTcuOTkyMDMgNC4xOTgyNTctNy45OTIwM0M0LjcxNDMyMS03Ljk5MjAzIDUuMDIxMTcxLTguMzQwNzIyIDUuNjc2NzEyLTkuMDY2MDAyTDUuNDgxNDQ1LTkuMjYxMjdaJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSc1Ni4wNjgzNjknIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtODInLz4KPHVzZSB4PSc3MC40NTI2MycgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNC02MScvPgo8dXNlIHg9Jzg4LjA1OTE2NycgeT0nLTEyLjU5MTc4OCcgeGxpbms6aHJlZj0nI2c0LTEyNicvPgo8dXNlIHg9Jzg0Ljk0OTA1JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2czLTcxJy8+Cjx1c2UgeD0nOTUuNzIxNjEnIHk9Jy02Ljk3Mzk4NScgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzEwMS45MDc5MycgeT0nLTIwLjM2Mzg1MicgeGxpbms6aHJlZj0nI2cwLTAnLz4KPHVzZSB4PScxMDguMzAwNjYnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtMjYnLz4KPHVzZSB4PScxMTUuMzQ0NjczJyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2czLTExNycvPgo8dXNlIHg9JzEyMy4xMTc1MicgeT0nLTE0LjgyNTAyMScgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzEyNi45NzkyNDQnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtMTEzJy8+Cjx1c2UgeD0nMTMzLjUzNDkyOScgeT0nLTIwLjM2Mzg1MicgeGxpbms6aHJlZj0nI2cwLTEnLz4KPHVzZSB4PScxNDMuMDI3MDk0JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PScxNTYuOTc0ODAyJyB5PSctMjQuNTQ4MjAzJyB4bGluazpocmVmPScjZzAtMTA0Jy8+Cjx1c2UgeD0nMTY1LjIyNDM4NCcgeT0nLTEyLjU5MTc4OCcgeGxpbms6aHJlZj0nI2c0LTEyNicvPgo8dXNlIHg9JzE2My41NjEyMzMnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtNzMnLz4KPHVzZSB4PScxNzMuMDA1NzInIHk9Jy0yMC4zNjM4NTInIHhsaW5rOmhyZWY9JyNnMC0wJy8+Cjx1c2UgeD0nMTc5LjM5ODQ1JyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2czLTI2Jy8+Cjx1c2UgeD0nMTg2LjQ0MjQ2MycgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnMy0xMTcnLz4KPHVzZSB4PScxOTQuMjE1MzA5JyB5PSctMTQuODI1MDIxJyB4bGluazpocmVmPScjZzItMTA1Jy8+Cjx1c2UgeD0nMTk4LjA3NzAzMycgeT0nLTIwLjM2Mzg1MicgeGxpbms6aHJlZj0nI2cwLTEnLz4KPHVzZSB4PScyMDkuOTA0NDU5JyB5PSctMTIuNTkxNzg4JyB4bGluazpocmVmPScjZzQtMTI2Jy8+Cjx1c2UgeD0nMjA2Ljc5NDM0MicgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnMy03MScvPgo8dXNlIHg9JzIxNy41NjY5MDInIHk9Jy02Ljk3Mzk4NScgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzIyMS40Mjg2MjYnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtMTEzJy8+Cjx1c2UgeD0nMjMxLjA4Mzc3MicgeT0nLTkuMDY2MTMnIHhsaW5rOmhyZWY9JyNnNC00MycvPgo8dXNlIHg9JzI0NC44MDUzMjcnIHk9Jy0yNC41NDgyMDMnIHhsaW5rOmhyZWY9JyNnMC0xNicvPgo8dXNlIHg9JzI1NC43OTgzNycgeT0nLTEyLjU5MTc4OCcgeGxpbms6aHJlZj0nI2c0LTEyNicvPgo8dXNlIHg9JzI1My4xMzUyMTknIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtNzMnLz4KPHVzZSB4PScyNjAuMjU1MTExJyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2czLTExMycvPgo8dXNlIHg9JzI2Ni44MTA3OTYnIHk9Jy0yNC41NDgyMDMnIHhsaW5rOmhyZWY9JyNnMC0xNycvPgo8dXNlIHg9JzI3Ny40NjUyNzcnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtNzEnLz4KPHVzZSB4PScyODguMjM3ODM4JyB5PSctNi45NzM5ODUnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PScyOTQuNDI0MTU3JyB5PSctMjAuMzYzODUyJyB4bGluazpocmVmPScjZzAtMCcvPgo8dXNlIHg9JzMwMC44MTY4ODcnIHk9Jy05LjA2NjEzJyB4bGluazpocmVmPScjZzMtMjYnLz4KPHVzZSB4PSczMDcuODYwOTAxJyB5PSctOS4wNjYxMycgeGxpbms6aHJlZj0nI2czLTExNycvPgo8dXNlIHg9JzMxNS42MzM3NDcnIHk9Jy0xNC44MjUwMjEnIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PSczMTkuNDk1NDcxJyB5PSctMjAuMzYzODUyJyB4bGluazpocmVmPScjZzAtMScvPgo8dXNlIHg9JzMyNS44ODgxODMnIHk9Jy0yNC41NDgyMDMnIHhsaW5rOmhyZWY9JyNnMC0xMDUnLz4KPC9nPgo8L3N2Zz4KPCEtLSBERVBUSD0wIC0tPg==)
where  and
and  represent interpolation and gradients evaluated at an integration point. Both options are available in Fuego.
represent interpolation and gradients evaluated at an integration point. Both options are available in Fuego.
The NSO computed from such residuals can add an unnecessarily large amount of dissipation in some cases. For this reason, we limit the NSO coefficient to the upwind value as
(3.830)
where ![g_{ij} = \left[g^{ij}\right]^{-1}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDMuMC4zIC0tPgo8c3ZnIHZlcnNpb249JzEuMScgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluaycgd2lkdGg9JzcyLjkzMTIyNHB0JyBoZWlnaHQ9JzE5LjI1OTYyOHB0JyB2aWV3Qm94PScwIC0xNC4zNzc4MzggNzIuOTMxMjI0IDE5LjI1OTYyOCc+CjxkZWZzPgo8cGF0aCBpZD0nZzQtNDknIGQ9J00yLjg3MDQyMy02LjI0ODU0MUMyLjg3MDQyMy02LjQ4Mjg2MSAyLjg3MDQyMy02LjUwMjM4OCAyLjY0NTg2Ni02LjUwMjM4OEMyLjA0MDUzOS01Ljg3NzUzNCAxLjE4MTM2NS01Ljg3NzUzNCAuODY4OTM4LTUuODc3NTM0Vi01LjU3NDg3QzEuMDY0MjA1LTUuNTc0ODcgMS42NDAyNDItNS41NzQ4NyAyLjE0NzkzNi01LjgyODcxN1YtLjc3MTMwNEMyLjE0NzkzNi0uNDE5ODI0IDIuMTE4NjQ2LS4zMDI2NjQgMS4yMzk5NDUtLjMwMjY2NEguOTI3NTE4VjBDMS4yNjkyMzUtLjAyOTI5IDIuMTE4NjQ2LS4wMjkyOSAyLjUwOTE4LS4wMjkyOVMzLjc0OTEyNC0uMDI5MjkgNC4wOTA4NDEgMFYtLjMwMjY2NEgzLjc3ODQxNEMyLjg5OTcxMy0uMzAyNjY0IDIuODcwNDIzLS40MTAwNiAyLjg3MDQyMy0uNzcxMzA0Vi02LjI0ODU0MVonLz4KPHBhdGggaWQ9J2cyLTEwNScgZD0nTTIuNzcyNzktNi4xMDIwOUMyLjc3Mjc5LTYuMjk3MzU3IDIuNjM2MTAzLTYuNDUzNTcxIDIuNDExNTQ2LTYuNDUzNTcxQzIuMTQ3OTM2LTYuNDUzNTcxIDEuODg0MzI2LTYuMTk5NzI0IDEuODg0MzI2LTUuOTM2MTE0QzEuODg0MzI2LTUuNzUwNjEgMi4wMjEwMTItNS41ODQ2MzMgMi4yNTUzMzMtNS41ODQ2MzNDMi40Nzk4OS01LjU4NDYzMyAyLjc3Mjc5LTUuODA5MTkgMi43NzI3OS02LjEwMjA5Wk0yLjAzMDc3Ni0yLjQzMTA3M0MyLjE0NzkzNi0yLjcxNDIxIDIuMTQ3OTM2LTIuNzMzNzM3IDIuMjQ1NTY5LTIuOTk3MzQ3QzIuMzIzNjc2LTMuMTkyNjE0IDIuMzcyNDkzLTMuMzI5MzAxIDIuMzcyNDkzLTMuNTE0ODA0QzIuMzcyNDkzLTMuOTU0MTU1IDIuMDYwMDY2LTQuMzE1Mzk4IDEuNTcxODk5LTQuMzE1Mzk4Qy42NTQxNDQtNC4zMTUzOTggLjI4MzEzNy0yLjg5OTcxMyAuMjgzMTM3LTIuODExODQzQy4yODMxMzctMi43MTQyMSAuMzgwNzctMi43MTQyMSAuNDAwMjk3LTIuNzE0MjFDLjQ5NzkzMS0yLjcxNDIxIC41MDc2OTQtMi43MzM3MzcgLjU1NjUxMS0yLjg4OTk1Qy44MjAxMjEtMy44MDc3MDQgMS4yMTA2NTUtNC4xMDA2MDUgMS41NDI2MDgtNC4xMDA2MDVDMS42MjA3MTUtNC4xMDA2MDUgMS43ODY2OTItNC4xMDA2MDUgMS43ODY2OTItMy43ODgxNzhDMS43ODY2OTItMy41ODMxNDggMS43MTgzNDktMy4zNzgxMTcgMS42NzkyOTUtMy4yODA0ODRDMS42MDExODktMy4wMjY2MzcgMS4xNjE4MzgtMS44OTQwODkgMS4wMDU2MjUtMS40NzQyNjVDLjkwNzk5MS0xLjIyMDQxOCAuNzgxMDY4LS44OTgyMjggLjc4MTA2OC0uNjkzMTk3Qy43ODEwNjgtLjIzNDMyIDEuMTEzMDIxIC4xMDczOTcgMS41ODE2NjIgLjEwNzM5N0MyLjQ5OTQxNiAuMTA3Mzk3IDIuODYwNjYtMS4zMDgyODggMi44NjA2Ni0xLjM5NjE1OEMyLjg2MDY2LTEuNDkzNzkyIDIuNzcyNzktMS40OTM3OTIgMi43NDM1LTEuNDkzNzkyQzIuNjQ1ODY2LTEuNDkzNzkyIDIuNjQ1ODY2LTEuNDY0NTAyIDIuNTk3MDUtMS4zMTgwNTJDMi40MjEzMDktLjcwMjk2MSAyLjA5OTExOS0uMTA3Mzk3IDEuNjAxMTg5LS4xMDczOTdDMS40MzUyMTItLjEwNzM5NyAxLjM2Njg2OC0uMjA1MDMgMS4zNjY4NjgtLjQyOTU4N0MxLjM2Njg2OC0uNjczNjcxIDEuNDI1NDQ4LS44MTAzNTggMS42NTAwMDUtMS40MDU5MjJMMi4wMzA3NzYtMi40MzEwNzNaJy8+CjxwYXRoIGlkPSdnMi0xMDYnIGQ9J00zLjg3NjA0OC02LjEwMjA5QzMuODc2MDQ4LTYuMjg3NTk0IDMuNzM5MzYxLTYuNDUzNTcxIDMuNTA1MDQxLTYuNDUzNTcxQzMuMjgwNDg0LTYuNDUzNTcxIDIuOTg3NTgzLTYuMjI5MDE0IDIuOTg3NTgzLTUuOTM2MTE0QzIuOTg3NTgzLTUuNzQwODQ3IDMuMTI0MjctNS41ODQ2MzMgMy4zNDg4MjctNS41ODQ2MzNDMy42MTI0MzgtNS41ODQ2MzMgMy44NzYwNDgtNS44Mzg0OCAzLjg3NjA0OC02LjEwMjA5Wk0xLjkxMzYxNiAuNDg4MTY3QzEuNzI4MTEyIDEuMjMwMTgxIDEuMjU5NDcxIDEuNzg2NjkyIC43MTI3MjQgMS43ODY2OTJDLjY1NDE0NCAxLjc4NjY5MiAuNTA3Njk0IDEuNzg2NjkyIC4zMzE5NTQgMS42OTg4MjJDLjYyNDg1NCAxLjYzMDQ3OSAuNzcxMzA0IDEuMzc2NjMyIC43NzEzMDQgMS4xODEzNjVDLjc3MTMwNCAxLjAyNTE1MSAuNjYzOTA3IC44Mzk2NDggLjQwMDI5NyAuODM5NjQ4Qy4xNTYyMTQgLjgzOTY0OC0uMTI2OTIzIDEuMDQ0Njc4LS4xMjY5MjMgMS4zOTYxNThDLS4xMjY5MjMgMS43ODY2OTIgLjI2MzYxIDIuMDAxNDg2IC43MzIyNTEgMi4wMDE0ODZDMS40MTU2ODUgMi4wMDE0ODYgMi4zMjM2NzYgMS40ODQwMjggMi41Njc3NiAuNTE3NDU3TDMuNDY1OTg3LTMuMDU1OTI3QzMuNTE0ODA0LTMuMjUxMTk0IDMuNTE0ODA0LTMuMzg3ODgxIDMuNTE0ODA0LTMuNDE3MTcxQzMuNTE0ODA0LTMuOTczNjgxIDMuMTA0NzQ0LTQuMzE1Mzk4IDIuNjE2NTc2LTQuMzE1Mzk4QzEuNjIwNzE1LTQuMzE1Mzk4IDEuMDY0MjA1LTIuODk5NzEzIDEuMDY0MjA1LTIuODExODQzQzEuMDY0MjA1LTIuNzE0MjEgMS4xNjE4MzgtMi43MTQyMSAxLjE4MTM2NS0yLjcxNDIxQzEuMjY5MjM1LTIuNzE0MjEgMS4yNzg5OTgtMi43MjM5NzMgMS4zNTcxMDUtMi45MDk0NzdDMS42MDExODktMy41MDUwNDEgMi4wNTAzMDItNC4xMDA2MDUgMi41ODcyODYtNC4xMDA2MDVDMi43MjM5NzMtNC4xMDA2MDUgMi44OTk3MTMtNC4wNjE1NTEgMi44OTk3MTMtMy42NTE0OTFDMi44OTk3MTMtMy40MjY5MzQgMi44NzA0MjMtMy4zMTk1MzcgMi44MzEzNy0zLjE1MzU2TDEuOTEzNjE2IC40ODgxNjdaJy8+CjxwYXRoIGlkPSdnNS02MScgZD0nTTkuNDE0Njk1LTQuNTE5MDU0QzkuNjA5OTYzLTQuNTE5MDU0IDkuODYxMDIxLTQuNTE5MDU0IDkuODYxMDIxLTQuNzcwMTEyQzkuODYxMDIxLTUuMDM1MTE4IDkuNjIzOTEtNS4wMzUxMTggOS40MTQ2OTUtNS4wMzUxMThIMS4xOTk1MDJDMS4wMDQyMzQtNS4wMzUxMTggLjc1MzE3Ni01LjAzNTExOCAuNzUzMTc2LTQuNzg0MDZDLjc1MzE3Ni00LjUxOTA1NCAuOTkwMjg2LTQuNTE5MDU0IDEuMTk5NTAyLTQuNTE5MDU0SDkuNDE0Njk1Wk05LjQxNDY5NS0xLjkyNDc4MkM5LjYwOTk2My0xLjkyNDc4MiA5Ljg2MTAyMS0xLjkyNDc4MiA5Ljg2MTAyMS0yLjE3NTg0MUM5Ljg2MTAyMS0yLjQ0MDg0NyA5LjYyMzkxLTIuNDQwODQ3IDkuNDE0Njk1LTIuNDQwODQ3SDEuMTk5NTAyQzEuMDA0MjM0LTIuNDQwODQ3IC43NTMxNzYtMi40NDA4NDcgLjc1MzE3Ni0yLjE4OTc4OEMuNzUzMTc2LTEuOTI0NzgyIC45OTAyODYtMS45MjQ3ODIgMS4xOTk1MDItMS45MjQ3ODJIOS40MTQ2OTVaJy8+CjxwYXRoIGlkPSdnMy0xMDMnIGQ9J000LjcxNDMyMS0xLjc3MTM1N0M0LjY1ODUzMS0xLjU0ODE5NCA0LjYzMDYzNS0xLjQ5MjQwMyA0LjQ0OTMxNS0xLjI4MzE4OEMzLjg3NzQ2LS41NDM5NiAzLjI5MTY1Ni0uMjc4OTU0IDIuODU5Mjc4LS4yNzg5NTRDMi4zOTkwMDQtLjI3ODk1NCAxLjk2NjYyNS0uNjQxNTk0IDEuOTY2NjI1LTEuNjAzOTg1QzEuOTY2NjI1LTIuMzQzMjEzIDIuMzg1MDU2LTMuOTA1MzU1IDIuNjkxOTA1LTQuNTMzMDAxQzMuMDk2Mzg5LTUuMzE0MDcyIDMuNzI0MDM1LTUuODcxOTggNC4zMDk4MzgtNS44NzE5OEM1LjIzMDM4Ni01Ljg3MTk4IDUuNDExNzA2LTQuNzI4MjY5IDUuNDExNzA2LTQuNjQ0NTgzTDUuMzY5ODYzLTQuNDQ5MzE1TDQuNzE0MzIxLTEuNzcxMzU3Wk01LjU3OTA3OC01LjIzMDM4NkM1LjM5Nzc1OC01LjYzNDg2OSA1LjAwNzIyMy02LjE1MDkzNCA0LjMwOTgzOC02LjE1MDkzNEMyLjc4OTUzOS02LjE1MDkzNCAxLjA2MDAyNS00LjI0MDEgMS4wNjAwMjUtMi4xNjE4OTNDMS4wNjAwMjUtLjcxMTMzMyAxLjkzODczIDAgMi44MzEzODIgMEMzLjU3MDYxIDAgNC4yMjYxNTItLjU4NTgwMyA0LjQ3NzIxLS44NjQ3NTdMNC4xNzAzNjEgLjM5MDUzNUMzLjk3NTA5MyAxLjE1NzY1OSAzLjg5MTQwNyAxLjUwNjM1MSAzLjM4OTI5IDEuOTk0NTIxQzIuODE3NDM1IDIuNTY2Mzc2IDIuMjg3NDIyIDIuNTY2Mzc2IDEuOTgwNTczIDIuNTY2Mzc2QzEuNTYyMTQyIDIuNTY2Mzc2IDEuMjEzNDUgMi41Mzg0ODEgLjg2NDc1NyAyLjQyNjg5OUMxLjMxMTA4MyAyLjMwMTM3IDEuNDIyNjY1IDEuOTEwODM0IDEuNDIyNjY1IDEuNzU3NDFDMS40MjI2NjUgMS41MzQyNDcgMS4yNTUyOTMgMS4zMTEwODMgLjk0ODQ0MyAxLjMxMTA4M0MuNjEzNjk5IDEuMzExMDgzIC4yNTEwNTkgMS41OTAwMzcgLjI1MTA1OSAyLjA1MDMxMUMuMjUxMDU5IDIuNjIyMTY3IC44MjI5MTQgMi44NDUzMyAyLjAwODQ2OCAyLjg0NTMzQzMuODA3NzIxIDIuODQ1MzMgNC43NDIyMTcgMS42ODc2NzEgNC45MjM1MzcgLjkzNDQ5Nkw2LjQ3MTczMS01LjMxNDA3MkM2LjUxMzU3NC01LjQ4MTQ0NSA2LjUxMzU3NC01LjUwOTM0IDYuNTEzNTc0LTUuNTM3MjM1QzYuNTEzNTc0LTUuNzMyNTAzIDYuMzYwMTQ5LTUuODg1OTI4IDYuMTUwOTM0LTUuODg1OTI4QzUuODE2MTg5LTUuODg1OTI4IDUuNjIwOTIyLTUuNjA2OTc0IDUuNTc5MDc4LTUuMjMwMzg2WicvPgo8cGF0aCBpZD0nZzAtMicgZD0nTTIuODE3NDM1IDE2LjE2NTM4SDUuNDk1MzkyVjE1LjYwNzQ3MkgzLjM3NTM0MlYwSDUuNDk1MzkyVi0uNTU3OTA4SDIuODE3NDM1VjE2LjE2NTM4WicvPgo8cGF0aCBpZD0nZzAtMycgZD0nTTIuOTg0ODA3IDE2LjE2NTM4Vi0uNTU3OTA4SC4zMDY4NDlWMEgyLjQyNjg5OVYxNS42MDc0NzJILjMwNjg0OVYxNi4xNjUzOEgyLjk4NDgwN1onLz4KPHBhdGggaWQ9J2cxLTAnIGQ9J002LjQzNDA0NC0yLjI0NTU2OUM2LjYwMDAyMS0yLjI0NTU2OSA2Ljc3NTc2MS0yLjI0NTU2OSA2Ljc3NTc2MS0yLjQ0MDgzNlM2LjYwMDAyMS0yLjYzNjEwMyA2LjQzNDA0NC0yLjYzNjEwM0gxLjE1MjA3NUMuOTg2MDk4LTIuNjM2MTAzIC44MTAzNTgtMi42MzYxMDMgLjgxMDM1OC0yLjQ0MDgzNlMuOTg2MDk4LTIuMjQ1NTY5IDEuMTUyMDc1LTIuMjQ1NTY5SDYuNDM0MDQ0WicvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMCcgeT0nMCcgeGxpbms6aHJlZj0nI2czLTEwMycvPgo8dXNlIHg9JzYuNTM5NTI2JyB5PScyLjA5MjE0NScgeGxpbms6aHJlZj0nI2cyLTEwNScvPgo8dXNlIHg9JzkuOTAzMTI0JyB5PScyLjA5MjE0NScgeGxpbms6aHJlZj0nI2cyLTEwNicvPgo8dXNlIHg9JzE4Ljg1NTA2NycgeT0nMCcgeGxpbms6aHJlZj0nI2c1LTYxJy8+Cjx1c2UgeD0nMzMuMzUxNDg3JyB5PSctMTEuMjk3NzIxJyB4bGluazpocmVmPScjZzAtMicvPgo8dXNlIHg9JzM5LjE2MzA1MicgeT0nMCcgeGxpbms6aHJlZj0nI2czLTEwMycvPgo8dXNlIHg9JzQ2LjIwMzAyJyB5PSctNS4wNjE1MDknIHhsaW5rOmhyZWY9JyNnMi0xMDUnLz4KPHVzZSB4PSc0OS41NjY2MTknIHk9Jy01LjA2MTUwOScgeGxpbms6aHJlZj0nI2cyLTEwNicvPgo8dXNlIHg9JzU0LjY0NDIzNicgeT0nLTExLjI5NzcyMScgeGxpbms6aHJlZj0nI2cwLTMnLz4KPHVzZSB4PSc2MC40NTU3OTQnIHk9Jy04LjA4NTkwNCcgeGxpbms6aHJlZj0nI2cxLTAnLz4KPHVzZSB4PSc2OC4wNDk1MzMnIHk9Jy04LjA4NTkwNCcgeGxpbms6aHJlZj0nI2c0LTQ5Jy8+CjwvZz4KPC9zdmc+CjwhLS0gREVQVEg9NyAtLT4=) . Additionally, as it’s based on the mesh discretization error, the NSO coefficient tends to vary strongly on short length scales. For numerical robustness, we average the NSO viscosity over control volumes, and then interpolate back to the subcontrol surfaces to evaluate the diffusion term; that is,
. Additionally, as it’s based on the mesh discretization error, the NSO coefficient tends to vary strongly on short length scales. For numerical robustness, we average the NSO viscosity over control volumes, and then interpolate back to the subcontrol surfaces to evaluate the diffusion term; that is,
(3.831)
This operation effectively smooths the NSO viscosity over a patch of elements. The nonlinear stabilization viscosity is not included at the boundaries.
3.4.4.7.1. Variable Density
The discretization of the time derivative requires special attention for variable density flows. The density time-derivative in the continuity equation must be predicted in a continuous manner. The density at the new time level in the convection terms and the transport equation time terms must also be predicted.
The transport equations are solved in conservative form, so density appears in the time derivative. With a segregated solution strategy, the density at the new time level is not available until the transport equations have been solved once. A density predictor is required. A generic time term is written as
(3.832)
There are two approaches to estimating the new density.
The simplest approach is to use the most recent value.
The other approach is to use a density predictor.
The predicted value of density at the new time level,  ,
is computed from the old density and the current density
time derivative. Introduce the nodal variable
,
is computed from the old density and the current density
time derivative. Introduce the nodal variable  for the discrete
density time-derivative such that
for the discrete
density time-derivative such that
(3.833)
(3.834)
The density derivative,  ,
is always updated at the bottom of the transport equation loop
after a new set of temperatures and mass fractions is available.
The two approaches are different for the first nonlinear sub-iteration
within a time step, but yield equivalent values upon subsequent
sub-iterations. The new density is also computed at the bottom
of the equation loop. This value is ignored upon subsequent
sub-iterations if using the density predictor. But, this
new density value will get copied to the old time level when
the time step is advanced. It is important to note that this
new “old” velocity is not consistent with the density that
was used in the old transport equations, but it seems critical
to the success of this approach to do so.
,
is always updated at the bottom of the transport equation loop
after a new set of temperatures and mass fractions is available.
The two approaches are different for the first nonlinear sub-iteration
within a time step, but yield equivalent values upon subsequent
sub-iterations. The new density is also computed at the bottom
of the equation loop. This value is ignored upon subsequent
sub-iterations if using the density predictor. But, this
new density value will get copied to the old time level when
the time step is advanced. It is important to note that this
new “old” velocity is not consistent with the density that
was used in the old transport equations, but it seems critical
to the success of this approach to do so.
For the first nonlinear iteration within a time step, the effect of the density at the new time level is predicted by carrying forward the best approximation of the density time-derivative from the last time step. The continuity equation is implemented as
(3.835)
where the density time-derivative is the most recent value and the
density in the convection is estimated in the same manner as the
transport equations. The density time-derivative, ,
must be stored as a persistent nodal variable in order
to have a good estimate for the continuity equation from
step to step.
3.4.4.7.2. Open Boundary Conditions
Open boundary conditions are used for boundaries where the flow can go either in or out. The direction of the flow is determined by the local force balance. In this documentation, the open boundary condition is also referred to as the outflow boundary condition. There are two parts to the outflow boundary condition. The first part concerns computing a velocity field that satisfies continuity. The second part concerns selecting the proper convected scalar value depending if the flow is in or out of the domain. Control volume balances are implemented at open boundaries for continuity, momentum, and the other transport equations.
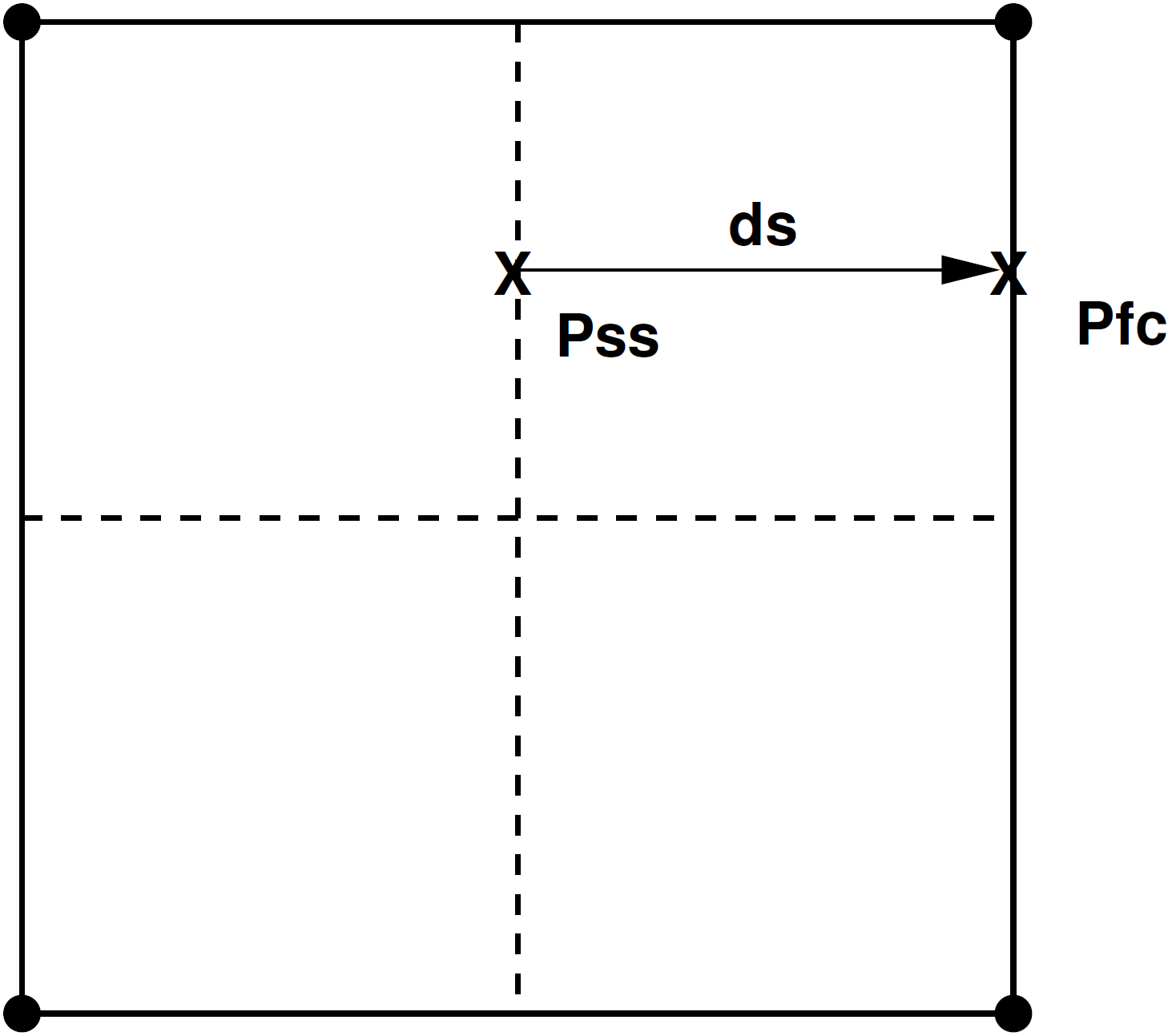
Fig. 3.31 Boundary mass flux integration locations.
A fixed pressure value is specified for the continuity and momentum equations. The nodal values of pressure on the boundary are allowed to float. A mass flux condition is formulated at the boundary in order to drive the boundary pressures towards the specified boundary pressure and to provide a boundary mass flow rate for the other transport equations. The form of the boundary mass flux is similar to the pressure-stabilized interior mass fluxes (see section Flow Solver). The equation for the mass flux at a boundary face, shown in Figure 3.31, is
(3.836)
and the interpolation formula for a single velocity component is
(3.837)
The upper case velocities,  , are nodal velocities, while the
lower case velocity,
, are nodal velocities, while the
lower case velocity,  , is the boundary velocity.
The average pressure,
, is the boundary velocity.
The average pressure,  , is computed at the opposing subface
centroid and evaluated at the new time level,
, is computed at the opposing subface
centroid and evaluated at the new time level,  . The boundary
pressure,
. The boundary
pressure,  , is evaluated at the boundary subface centroid
and is the “specified” pressure. The operator,
, is evaluated at the boundary subface centroid
and is the “specified” pressure. The operator,  , is the
discrete gradient operator for node . In the case of the semi-discrete
formulation, the last term is dropped in (3.837)
and
, is the
discrete gradient operator for node . In the case of the semi-discrete
formulation, the last term is dropped in (3.837)
and  .
.
The nodal pressure gradient is required for the momentum balance and
the boundary mass flux formulation. The nodal pressure gradient is
constructed by a discrete Gauss divergence relation over the control
volumes. The pressure at most control volume subfaces is interpolated
from the nodes of the parent element, even over inflow, wall, and
symmetry boundaries. For outflow boundaries, the specified boundary
pressure, , is used.
Nodal velocities on open boundaries are corrected with the projection.
On pressure-specified open boundaries, the flow will sometimes exit and reenter the domain through some sort of entrainment process. The process will look non-physical and is due to the artificially imposed constant pressure. A method of counteracting the reentrance problem is to turn off the convection terms in the momentum equations for control-volume subfaces which have reentrant flow. This condition is optional and can be set on a side-set basis.
If the flow is entrained into the domain, then far-field values must be specified for the scalar variables.